



Discover World-Leading Unmanned and Autonomous Technologies
Discover cutting-edge solutions from leading global suppliers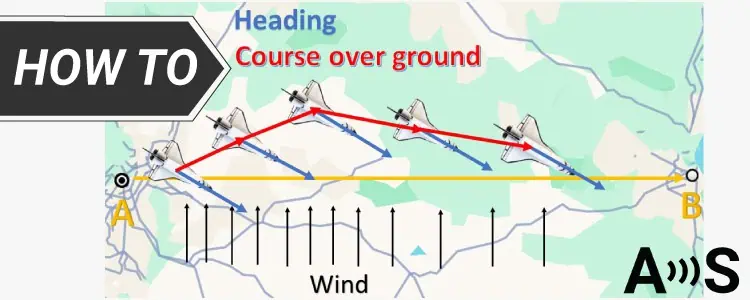
ArduSimple details below how the company’s advanced RTK GNSS systems can help in calculating the real heading of a given vehicle, highlighting the importance of understanding specific terms commonly used in measuring vehicle direction.
In GNSS and GPS, terms like heading, course, track, and yaw are often used, sometimes incorrectly (as if they mean the same thing), leading to confusion.
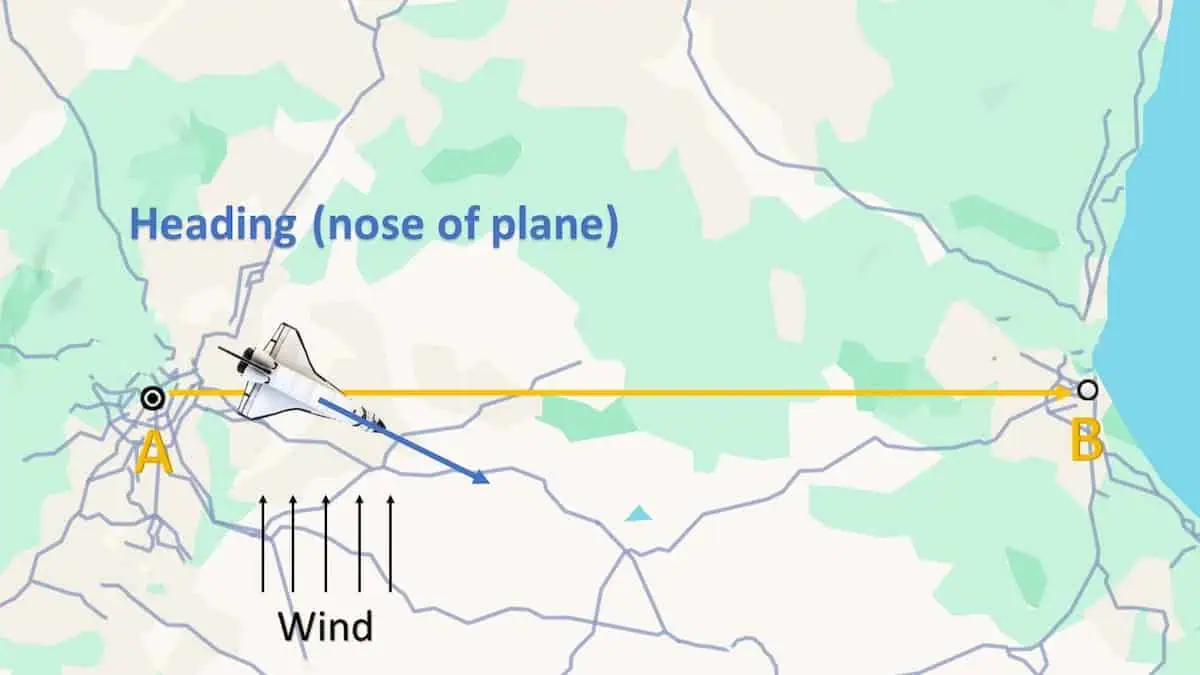
Heading
Heading refers to the direction in which a vehicle, boat, or plane is pointing. In GPS receivers, heading might also be called yaw, which indicates rotation around the vertical axis. Ideally, if traveling from point A to B, the heading matches the intended route.

However, wind or other factors often cause deviations from this path, requiring adjustments by orienting the nose of the vehicle into the wind.

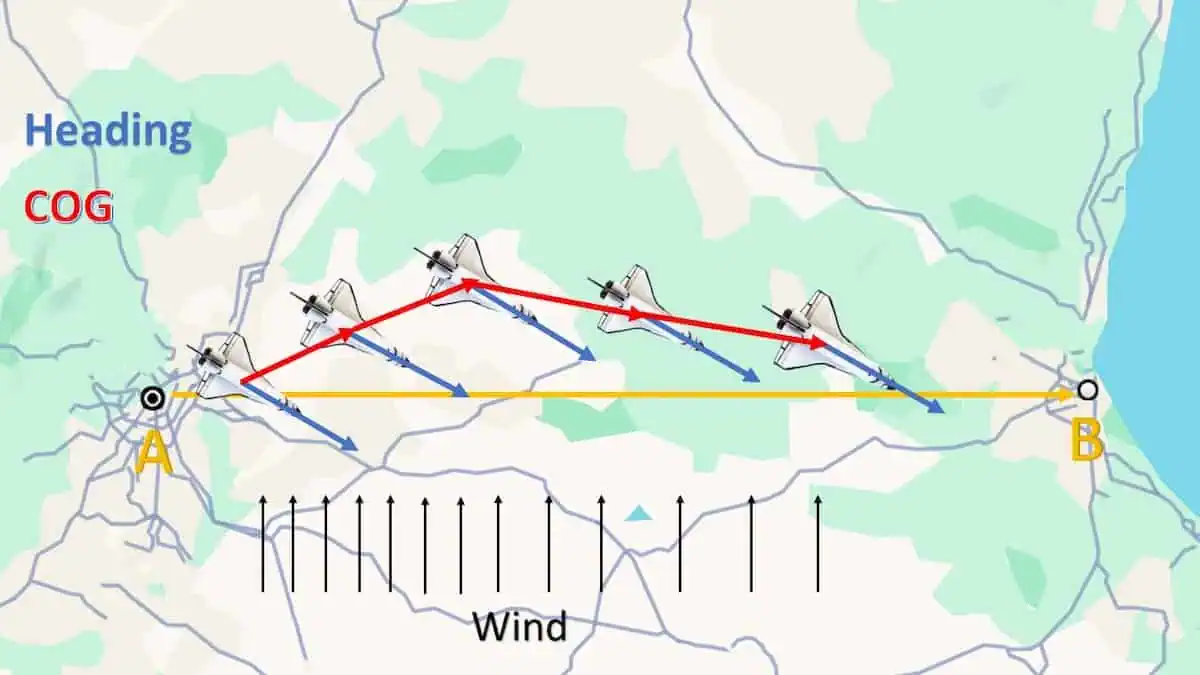
Course Over Ground
Course Over Ground (COG) is the actual direction an object is moving over the Earth’s surface, considering influences like wind or currents. COG reflects the real trajectory at a specific moment, sometimes referred to as the direction of motion. For example, if wind is stronger than expected, the COG will reflect this deviation.

Track
Track, also known as “track line” or “ground track,” refers to the recorded path of an object’s movement over time. It represents the sequence of positions that outline the historical route taken.


How to Measure Heading and Course Over Ground Using a GNSS Receiver
A GNSS receiver with a single antenna can determine COG by calculating position changes over time when the vehicle is in motion. However, it cannot detect rotational movements if the object is stationary. A dual-antenna GNSS receiver can determine heading regardless of whether the vehicle is moving or not by comparing the positions of the two antennas.
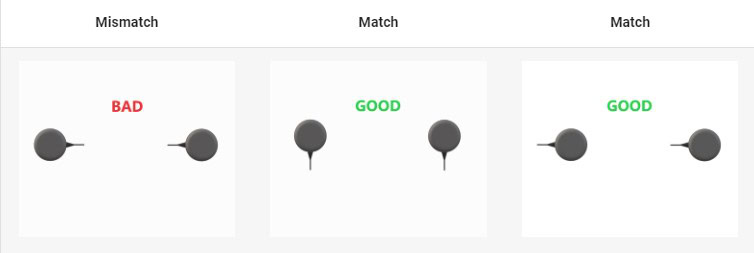
How to Place GNSS Antennas for Accurate Heading Data
To generate accurate heading data, a minimum distance between two antennas is required. Increasing the baseline length (distance between antennas) improves heading accuracy.
Generally, a minimum of 1 meter is needed for sub-degree precision under non-ideal conditions. For many vehicles, this is impractical, but decent results can still be achieved with 0.5 meters. At 0.3 meters, heading data may be noisy but acceptable for some applications.
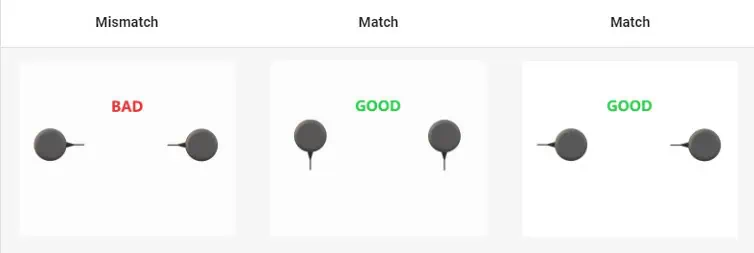
Both GNSS antennas should be identical and have the same physical orientation to maintain the best RF phase center alignment and heading accuracy, as the RF phase center is often offset from the antenna case’s physical center. Also, ensure identical RF cable lengths for both antennas.
The suitable positioning update rate varies by application: for slow-moving objects, a 1Hz rate might be sufficient, while faster ones may require 50Hz.
Recommendations for Better GNSS Heading Measurements:
- Use identical antennas
- Maximize the distance between antennas
- Maintain the same physical orientation
- Use equal-length antenna cables
ArduSimple Products for Heading Measurements:
- simpleRTK2B Heading – Basic Starter Kit: An affordable option for use cases with low update rate requirements
- simpleRTK3B Heading: Offers up to 50Hz heading updates
- simpleRTK2B SBC – Development Kit: Provides centimeter-level positioning and sub-degree heading accuracy
Read the original article >>












