



RTK GNSS
Discover cutting-edge solutions from 10 leading global suppliers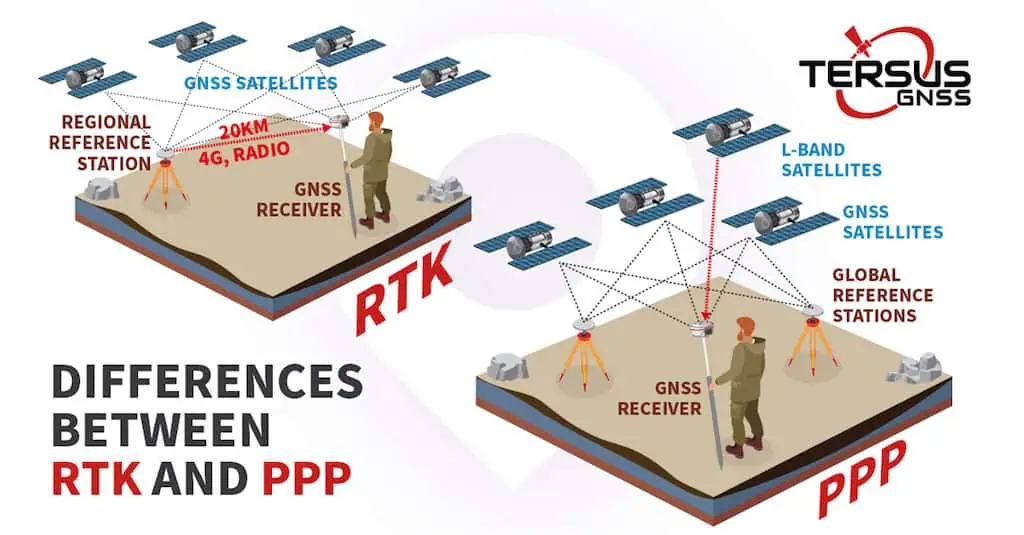
Tersus GNSS knows that the evolution of high-precision GNSS positioning has been shaped by two dominant technologies: Real-Time Kinematic (RTK) and Precise Point Positioning (PPP). Read more >>
Both have undergone decades of refinement and now play critical roles in applications ranging from autonomous vehicles and UAVs to marine navigation and precision agriculture. While each method delivers highly accurate positioning, their fundamental approaches differ, leading to distinct advantages and limitations in real-world deployment.
Core Differences
RTK positioning relies on a base station or Continuously Operating Reference Station (CORS) network to provide real-time corrections to a rover station. By utilizing simultaneous GNSS observations, RTK performs double-difference ambiguity fixing, rapidly achieving centimeter-level accuracy.
However, RTK’s reliance on a stable communication link between the base station and rover constrains its operational coverage. Signal interruptions or long distances between stations degrade its performance.
In contrast, PPP eliminates these range limitations by using a single GNSS receiver. Instead of depending on local base stations, PPP applies satellite-broadcasted correction data to resolve errors in real-time.
While this method significantly increases flexibility, it requires a convergence period before reaching peak accuracy. The introduction of PPP Ambiguity Resolution (PPPAR) has reduced this time delay, enhancing its suitability for dynamic applications.
The Science Behind Positioning Accuracy
At the core of high-precision GNSS lies the challenge of eliminating positioning errors. Traditional GNSS single-point positioning suffers from a range of inaccuracies, including satellite orbit and clock errors, ionospheric and tropospheric delays, and receiver-based errors.
RTK mitigates these issues by transmitting real-time correction data from a base station to the rover, allowing double-difference calculations to eliminate satellite-related errors and propagation delays. This method is highly effective when operating within a well-maintained RTK network with stable communication links.
PPP, on the other hand, addresses errors differently. It relies on satellite-broadcasted correction data, such as precise orbit (ORB) and clock (CLK) information, to mitigate satellite errors.
Additionally, PPP employs Uncalibrated Phase Delay (UPD) estimation to achieve ambiguity resolution, enabling precise results without needing a base station connection. This fundamental difference allows PPP to function in remote areas where RTK networks are unavailable, but it requires more time for accuracy to converge.
Choosing the Right Technology
The operational differences between RTK and PPP make each method suitable for specific scenarios. RTK excels in environments where a strong communication infrastructure is available, making it ideal for surveying, construction, and autonomous vehicle navigation in well-covered areas. When the base station is nearby and data transmission is uninterrupted, RTK offers the fastest and most reliable high-precision positioning.
PPP, meanwhile, provides greater flexibility by bypassing the need for ground-based infrastructure. It is particularly advantageous for offshore operations, remote sensing, and UAV applications where maintaining a real-time communication link is challenging. Its independence from base stations makes it a compelling alternative for industries seeking global, high-precision positioning without geographic limitations.
Recognizing the need for both RTK and PPP in modern applications, Tersus has introduced the Tersus Augmentation Platform (TAP), a satellite-based rapid convergence service leveraging PPP technology.
With TAP, Tersus GNSS receivers and boards seamlessly integrate RTK and PPP capabilities, enabling users to choose the most effective positioning method for their specific operational needs. This innovation marks a significant step forward in expanding the accessibility and efficiency of high-precision GNSS solutions across industries.
Read the original article, or visit the Tersus GNSS website to find out more.












