



Discover World-Leading Unmanned and Autonomous Technologies
Discover cutting-edge solutions from leading global suppliers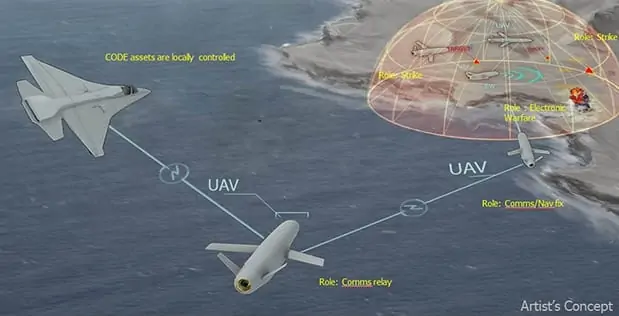
DARPA has announced that, in a recent test series at Yuma Proving Ground in Arizona, its Collaborative Operations in Denied Environment (CODE) program demonstrated the ability of CODE-equipped Unmanned Aerial Systems (UAS) to adapt and respond to unexpected threats in an anti-access area denial (A2AD) environment. The UAS efficiently shared information, cooperatively planned and allocated mission objectives, made coordinated tactical decisions, and collaboratively reacted to a dynamic, high-threat environment with minimal communication.
The air vehicles initially operated with supervisory mission commander interaction. When communications were degraded or denied, CODE vehicles retained mission plan intent to accomplish mission objectives without live human direction. The ability for CODE-enabled vehicles to interact when communications are degraded is an important step toward the program goal to conduct dynamic, long-distance engagements of highly mobile ground and maritime targets in contested or denied battlespace.
“The test series expanded on previously demonstrated approaches to low bandwidth collaborative sensing and on-board planning. It demonstrated the ability to operate in more challenging scenarios, where both communications and GPS navigation were denied for extended periods,” said Scott Wierzbanowski, DARPA program manager for CODE.
During the three-week ground and flight test series in a live/virtual/constructive (LVC) environment, up to six live and 24 virtual UAS served as surrogate strike assets, receiving mission objectives from a human mission commander. The systems then autonomously collaborated to navigate, search, localize, and engage both pre-planned and pop-up targets protected by a simulated Integrated Air Defense System (IADS) in communications- and GPS-denied scenarios.
“The demonstrated behaviors are the building blocks for an autonomous team that can collaborate and adjust to mission requirements and a changing environment,” said Wierzbanowski.
The DARPA team also has advanced the infrastructure necessary to support further development, integration, and testing of CODE as it transitions to future autonomous systems.
Achievements include incorporation of third-party autonomy algorithms into the current software build, the creation of a government repository and lab test environment for the CODE algorithms, and the successful demonstration of the Johns Hopkins University Applied Physics Laboratory White Force Network capability to provide constructive threats and effects in an LVC test environment.
CODE’s scalable capabilities could greatly enhance the survivability, flexibility, and effectiveness of existing air platforms, as well as reduce the development times and costs of future systems.
Further development of CODE and associated infrastructure will continue under DARPA until the conclusion of the program in spring 2019, followed by full transition of the CODE software repository to Naval Air Systems Command.












