Systemy odniesienia położenia i kierunku (AHRS) dla dronów i systemów bezzałogowych zapewniają stabilne zachowanie w powietrzu, precyzyjną kontrolę i niezawodne dane dotyczące kierunku w złożonych warunkach misji.
W tej kategorii przedstawiono wiodących dostawców systemów AHRS do nawigacji i stabilizacji bezzałogowych statków powietrznych (UAV), pojazdów naziemnych (UGV), pojazdów podwodnych (ROV) i bezzałogowych pojazdów podwodnych (UUV), oferujących rozwiązania orientacyjne zaprojektowane w celu utrzymania wiarygodnych danych dotyczących położenia, stabilnego kierunku i spójnego wsparcia kontroli w różnych profilach misji.
Rozwiązania sprzętowe dla bezzałogowych statków powietrznych: systemy napędowe i paliwowe, serwomechanizmy i kontrolery lotu, rozwiązania obrazujące, wyrzutnie i spadochrony
Jeśli projektujesz, budujesz lub dostarczasz Systemy odniesienia położenia i kierunku (AHRS), Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Wprowadzenie do systemów odniesienia położenia i kierunku (AHRS) dla systemów bezzałogowych
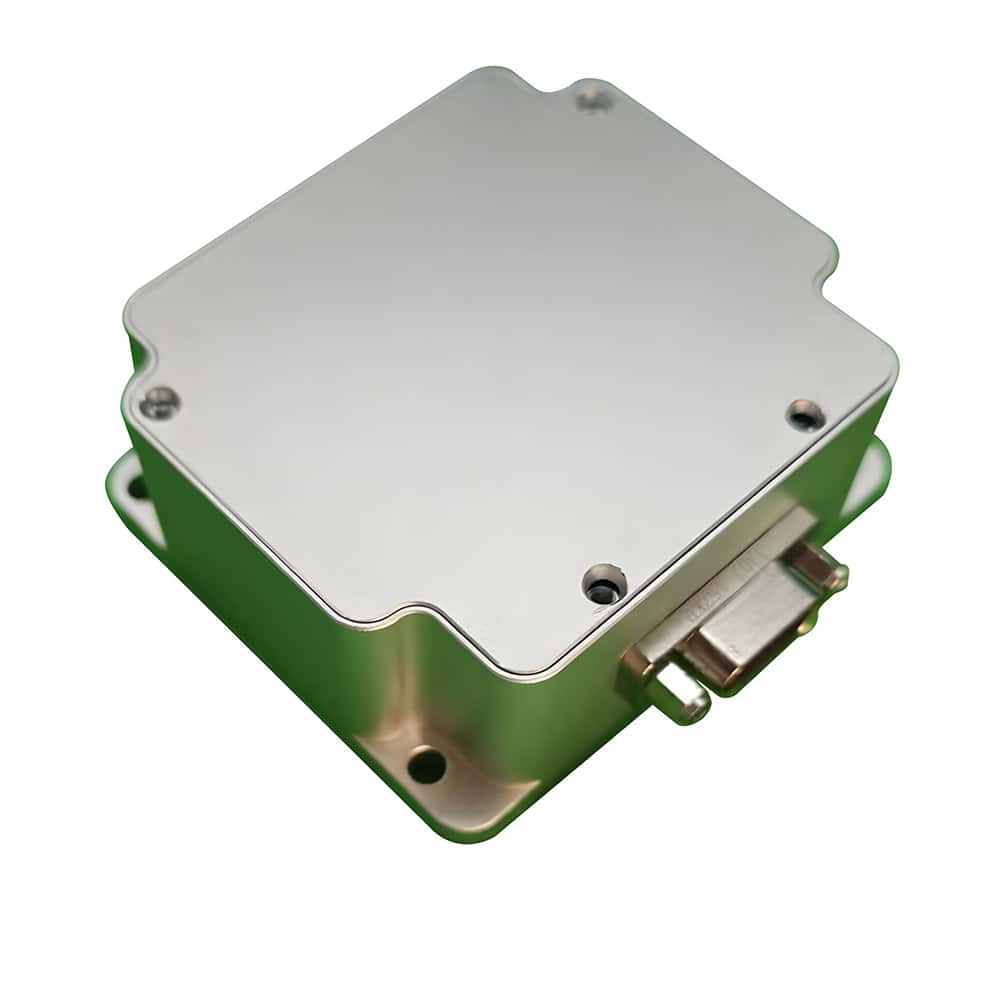
Ellipse-A AHRS firmy SBG Systems
System odniesienia położenia i kierunku (AHRS) zapewnia ciągłe, wysoce wiarygodne informacje o orientacji platformy. Oblicza on przechył, pochylenie i odchylenie, łącząc pomiary wielu czujników w stabilnym układzie odniesienia. Dane te mają kluczowe znaczenie, wspierając wszystko, od szybkich pętli autopilota w bezzałogowym statku powietrznym (UAV) po precyzyjną stabilizację ładunku w zdalnie sterowanym pojeździe (ROV).
W praktycznie wszystkich systemach bezzałogowych system AHRS jest głównym źródłem danych dotyczących położenia wykorzystywanych przez komputer pokładowy, sterownik napędu lub system nawigacyjny. Stabilne informacje o położeniu mają fundamentalne znaczenie dla utrzymania kontroli, umożliwiając złożone autonomiczne zachowania i zapewniając przewidywalną reakcję w bardzo dynamicznych środowiskach operacyjnych.
Porównanie systemów AHRS, IMU i INS
Chociaż terminy te są często używane zamiennie, dla inżynierów reprezentują one różne poziomy przetwarzania danych przez czujniki:
Integruje dane z IMU w celu obliczenia pozycji i prędkości.
Pozycja, prędkość i położenie.
Wykonuje pełną integrację pozycji i prędkości, wymagającą częstych korekt z zewnętrznych źródeł nawigacyjnych (takich jak GNSS) w celu zapobieżenia nieograniczonemu dryfowi.
3DM-CV7-AHRS System odniesienia położenia i kierunku firmy Microstrain by HBK
System AHRS działa skutecznie jako ograniczony estymator, wykorzystując grawitację (do pomiaru pochylenia/przechylenia) oraz pole magnetyczne Ziemi lub inne źródła nieinercyjne (do pomiaru kursu), aby zapobiec nieograniczonemu dryfowi pozycji/prędkości charakterystycznemu dla systemów INS. Dzięki temu idealnie nadają się one do pojazdów bezzałogowych i stabilizowanych ładunków, które już teraz wykorzystują zewnętrzne źródła nawigacyjne, takie jak GNSS lub pozycjonowanie akustyczne, do ustalania pozycji.
Kluczowe cechy nowoczesnych systemów odniesienia położenia i kursu
Hybrydowe INS/AHRS i wspomaganie GNSS
Połączenie technologii inercyjnej i nawigacyjnej doprowadziło do powstania bardzo niezawodnych rozwiązań. Urządzenia hybrydowe łączą ograniczone szacowanie AHRS z zaawansowanym wspomaganiem GNSS:
GNSS z podwójną anteną: służy do zapewnienia bardzo dokładnego, wstępnego odniesienia kursu, na które nie mają wpływu zakłócenia magnetyczne.
Korekty kinematyczne RTK/PPK: te bardzo dokładne techniki GNSS mogą być wykorzystywane do udoskonalania szacunków położenia, szczególnie podczas manewrów o dużej dynamice, zapewniając bardzo stabilny układ odniesienia.
Architektury te wypełniają lukę wydajnościową między tradycyjnym systemem AHRS a pełnym, zaawansowanym systemem INS, zapewniając stabilną wydajność nawet podczas agresywnych ruchów lub w obszarach o pogorszonej jakości magnetycznej.
Zminiaturyzowane, wysokowydajne czujniki MEMS
Ciągłe ulepszenia czujników inercyjnych MEMS (mikroelektromechanicznych systemów) znacznie zmniejszają różnicę w stosunku do znacznie większych systemów klasy taktycznej. Postępy w zakresie gęstości szumów i stabilności odchylenia pozwalają bardzo małym, zoptymalizowanym pod kątem SWaP urządzeniom AHRS zapewnić wydajność odpowiednią do wymagających misji UAV lub ROV, poszerzając możliwości mniejszych, ograniczonych rozmiarami platform bezzałogowych.
Odporność na działanie w warunkach braku sygnału GNSS
Ponieważ misje coraz częściej odbywają się w środowiskach, w których dostęp do GNSS jest utrudniony (pod wodą, w kanionach miejskich lub strefach wojny elektronicznej), systemy AHRS są coraz ściślej zintegrowane z zaawansowanymi algorytmami inercyjnymi i wspomagającymi prędkość. Pozwala to Państwu na zwiększenie odporności operacyjnej i utrzymanie wysokiej integralności szacowania orientacji w miejscach, gdzie zewnętrzna nawigacja satelitarna jest niedostępna. Systemy nowej generacji będą nadal ściśle powiązane z pokładowymi strukturami autonomicznymi, umożliwiając szybsze i bardziej niezawodne podejmowanie decyzji oraz precyzyjną kontrolę w najbardziej złożonych scenariuszach misji.
Architektura i zasady działania systemu AHRS dla bezzałogowych statków powietrznych (UAV)
Nowoczesne systemy odniesienia położenia i kierunku dla bezzałogowych statków powietrznych opierają się na trójosiowym układzie czujników inercyjnych i magnetometrów:
Żyroskopy: Dostarczają one krótkoterminowych informacji o prędkości kątowej, mierząc prędkość obrotową wzdłuż osi X, Y i Z. Dane z nich pochodzące są niezbędne do szybkiego reagowania na ruch platformy.
Akcelerometry: Wykrywają przyspieszenie liniowe i, co najważniejsze, wektor grawitacyjny Ziemi. Grawitacja działa jako długoterminowe, stabilne odniesienie dla filtra w celu określenia nachylenia i przechyłu.
Magnetometry: Odnoszą się one do pola magnetycznego Ziemi w celu określenia kierunku (odchylenia). Wydajność systemu jest bardzo zróżnicowana; inżynierowie muszą rozważyć kwestie SWaP (rozmiar, waga i moc) w przypadku małych bezzałogowych statków powietrznych w stosunku do wymagających charakterystyk niskiego dryfu i szumu wymaganych w przypadku wysokiej klasy urządzeń morskich lub obronnych.
Algorytmy przetwarzania sygnałów i fuzji czujników
Surowe dane inercyjne są z natury zakłócone i podlegają odchyleniom, zmianom termicznym i sprzężeniom międzyosiowym. Zanim dane te będą mogły zostać wykorzystane, przechodzą one zaawansowaną obróbkę sygnału. Prawdziwa magia dzieje się w warstwie fuzji czujników, która łączy te rozbieżne pomiary w jedną, spójną ocenę orientacji. Proces ten ma na celu kompensację sił przejściowych, wykorzystanie grawitacji do zapewnienia stabilności oraz zarządzanie aktualizacjami kursu na podstawie pola magnetycznego lub innych czujników pomocniczych.
Filtry Kalmana, uczenie maszynowe i szacowanie
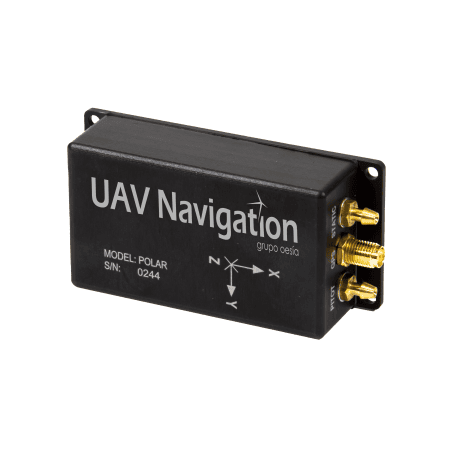
POLAR-300 AHRS-IMU firmy UAV Navigation-Grupo Oesía
Podstawą wysokowydajnego szacowania położenia pozostaje rozszerzony lub niescentowany filtr Kalmana (EKF/UKF). Te filtry probabilistyczne w sposób ciągły uzgadniają przewidywany stan systemu z rzeczywistymi danymi pomiarowymi, co skutecznie koryguje skumulowane odchylenia i tłumi szumy o wysokiej częstotliwości.
Producenci coraz częściej integrują uczenie maszynowe (ML) lub inne adaptacyjne komponenty obliczeniowe. Są one często wykorzystywane do rozwiązywania najtrudniejszych aspektów działania AHRS:
Adaptacyjne modelowanie szumów: wykrywanie i charakteryzowanie nietypowych szumów czujników (np. pochodzących z określonych częstotliwości wirnika).
Dynamiczne szacowanie odchylenia: dostosowywanie w czasie rzeczywistym do zmian odchylenia spowodowanych temperaturą i wibracjami.
Wykrywanie usterek czujników: identyfikowanie i izolowanie przejściowych lub trwałych awarii czujników.
Ulepszenia te znacznie zwiększają niezawodność, szczególnie w przypadku małych platform bezzałogowych, które często wykonują agresywne manewry i są narażone na wysokie poziomy wibracji.
Zarządzanie źródłami błędów, dryftem i kompensacją
Dla zespołów inżynierów wydajność sprowadza się do ograniczania głównych źródeł błędów: dryftu żyroskopowego, zakłóceń magnetycznych, zmian temperatury i wibracji.
Kalibracja: Fabryczna kalibracja i tabele kompensacji termicznej są niezbędne do ograniczenia początkowego odchylenia czujnika i niestabilności termicznej.
Kompensacja magnetyczna: W przypadku bezzałogowych systemów morskich i lądowych, w których często występują materiały żelazne lub lokalne anomalie magnetyczne, zaawansowane systemy wykorzystują adaptacyjne modelowanie magnetyczne w czasie rzeczywistym lub, co najważniejsze, przełączają się w tryb bezkursowy wspomagany przez zewnętrzne źródła nawigacyjne, takie jak dopplerowski log prędkości (DVL) lub system GNSS z podwójną anteną.
Oszacowanie odchylenia: Zdolność filtra Kalmana do szacowania i usuwania odchylenia żyroskopu w czasie rzeczywistym jest podstawową techniką zarządzania długoterminowym dryftem położenia.
Zastosowania AHRS w systemach bezzałogowych
Sterowanie lotem i stabilność nawigacji bezzałogowych statków powietrznych
System odniesienia położenia i kierunku lotu jest systemem nerwowym bezzałogowego statku powietrznego. Statki powietrzne z wieloma wirnikami wykorzystują szybkie informacje zwrotne o położeniu lotu z małym opóźnieniem do zarządzania wektorem ciągu i utrzymania lotu poziomego. Systemy stałopłatowe i VTOL wykorzystują dane AHRS do stabilizacji toru lotu, zarządzania dynamicznymi przejściami i poprawy georeferencjonowania dla kluczowych ładunków ISR (wywiad, nadzór i rozpoznanie). Precyzyjne dane dotyczące położenia są również kluczowe dla skutecznej kompensacji wiatru podczas autonomicznej nawigacji.
Mobilność pojazdów bezzałogowych i pokonywanie terenu
W przypadku robotów naziemnych spójne informacje o położeniu wspierają kontrolę trakcji, umożliwiając pojazdowi dokładną ocenę i bezpieczne zarządzanie kątami nachylenia. Dane dotyczące orientacji są również niezbędne dla systemów nawigacyjnych do prawidłowej interpretacji odległości przejechanej przez koła i utrzymania świadomości sytuacyjnej na nierównym lub trudnym terenie. Każda stabilizowana wieżyczka lub zaawansowany czujnik w pojeździe UGV opiera się na systemie AHRS w celu dokładnego wskazywania, zapewniając stabilne namierzenie celu pomimo ruchu platformy.
Szacowanie położenia pojazdów morskich ROV i USV
Środowisko morskie charakteryzuje się wyjątkową dynamiką. Pojazdy ROV i bezzałogowe pojazdy powierzchniowe (USV) podlegają ciągłym ruchom wywołanym falami, które należy odfiltrować, aby uzyskać użyteczne szacunki położenia. Największym wyzwaniem inżynieryjnym jest częste pogorszenie działania magnetometru spowodowane żelaznymi konstrukcjami statków, silnikami i infrastrukturą podwodną. Wysokowydajne morskie urządzenia AHRS priorytetowo traktują zatem wyjątkową wydajność żyroskopu i często integrują się z systemami akustycznymi lub dopplerowskimi, aby zapewnić stabilny, niezawodny kurs na wodach o trudnych warunkach magnetycznych.
AHRS dla stabilizowanych ładunków dronów i platform czujników UAV
Stabilizacja gimbala i czujnika EO/IR
Systemy gimbala wymagają szybkiego sprzężenia zwrotnego położenia i prędkości charakteryzującego się ultra niskim opóźnieniem, aby utrzymać stabilną linię wzroku podczas agresywnego ruchu platformy macierzystej. System odniesienia położenia i kursu zapewnia bezwzględne dane dotyczące orientacji i prędkości potrzebne do przeciwdziałania ruchom platformy, stabilizując kamery optyczne lub podczerwone używane do nadzoru, inspekcji lub namierzania. Jest to szczególnie ważne w przypadku mniejszych bezzałogowych statków powietrznych, w których drgania o wysokiej częstotliwości są stałym czynnikiem.
Kierowanie anteną i komunikacja
Anteny o wysokim zysku używane do łączy komunikacyjnych lub ładunków radarowych muszą zachować bardzo wysoką dokładność kierowania. Niezależnie od tego, czy chodzi o bezzałogowy statek powietrzny o stałym skrzydle, czy statek morski, system AHRS pozwala systemowi sterowania utrzymać linię widzenia niezależnie od ruchu pojazdu, zapewniając stabilne połączenia dla kierunkowych łączy danych, układów fazowanych i terminali SATCOM.
Kwestie związane z integracją i interfejsami
Skuteczna integracja wymaga starannego doboru standardów interfejsów i protokołów synchronizacji:
Interfejsy danych: Podczas gdy starsze lub specjalistyczne platformy wojskowe mogą wykorzystywać standardy ARINC lub MIL-STD-1553, zdecydowana większość nowoczesnych komercyjnych i przemysłowych architektur UAS opiera się na sieci CAN (Controller Area Network) ze względu na jej niezawodność i deterministyczne właściwości oraz na sieci Ethernet (coraz częściej z funkcjami TSN) ze względu na możliwość rejestrowania danych o dużej przepustowości i scentralizowanego przetwarzania. UART pozostaje powszechny w przypadku mikro-UAS o niskim SWaP.
Synchronizacja czasu: Dokładne zsynchronizowanie czasu między AHRS, odbiornikiem GNSS i komputerem misji ma kluczowe znaczenie dla precyzyjnego georeferencjonowania. Metody takie jak synchronizacja PPS (Pulse Per Second) lub protokoły czasu sieciowego zapewniają dokładne oznaczanie danych, minimalizując błędy w korelacji pozycji i położenia.
Integracja oprogramowania: Nowoczesne autopiloty i systemy sterowania preferują standardowe protokoły komunikacyjne, takie jak MAVLink lub ROS. Dostawcy AHRS zapewniający solidne interfejsy API i dobrze skonstruowane sterowniki znacznie skracają całkowity czas integracji i zmniejszają ryzyko dla integratorów systemów.
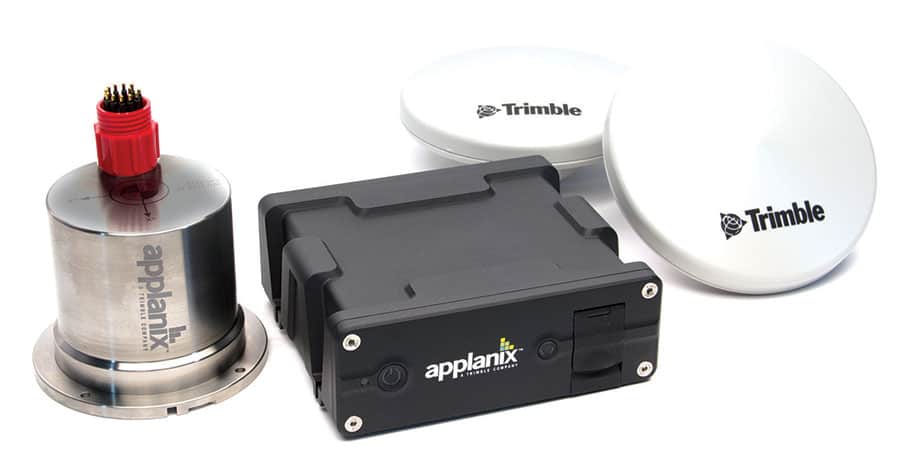
Firma Inertial Labs zaprezentowała system nawigacji inercyjnej IRINS LEO, integrujący nawigację inercyjną, odniesienie do wysokości i kursu oraz sprężysty pomiar czasu w celu zapewnienia pozycjonowania na lądzie, w powietrzu i na morzu w środowiskach o utrudnionym dostępie