Znajdź dostawców i producentów autonomicznych pojazdów podwodnych, technologii AUV, podwodnych szybowników i autonomicznych łodzi podwodnych do zastosowań badawczych, naukowych i wojskowych.
Jeśli projektujesz, budujesz lub dostarczasz Producenci autonomicznych pojazdów podwodnych AUV, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
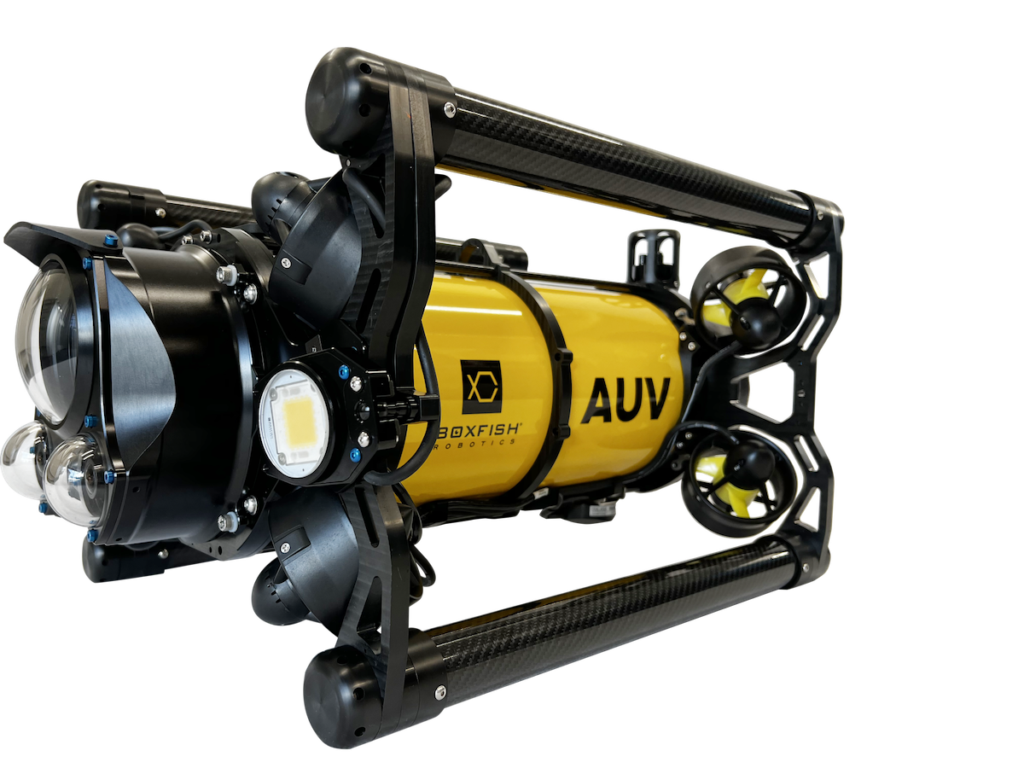
Boxfish AUV – bezprzewodowy pojazd podwodny firmy Boxfish Robotics
Autonomiczne pojazdy podwodne (AUV) są podgrupą bezzałogowych pojazdów podwodnych (UUV), które mogą funkcjonować bez sterowania w czasie rzeczywistym przez operatora ludzkiego. Można je zaprogramować tak, aby podążały za punktami trasy misji wzdłuż z góry ustalonej trasy i zbierały dane lub aktywowały inne ładunki. Niektóre autonomiczne łodzie podwodne mogą wykorzystywać sztuczną inteligencję (AI) do podejmowania decyzji i reagowania na zmiany w otoczeniu.
Podwodne szybowce
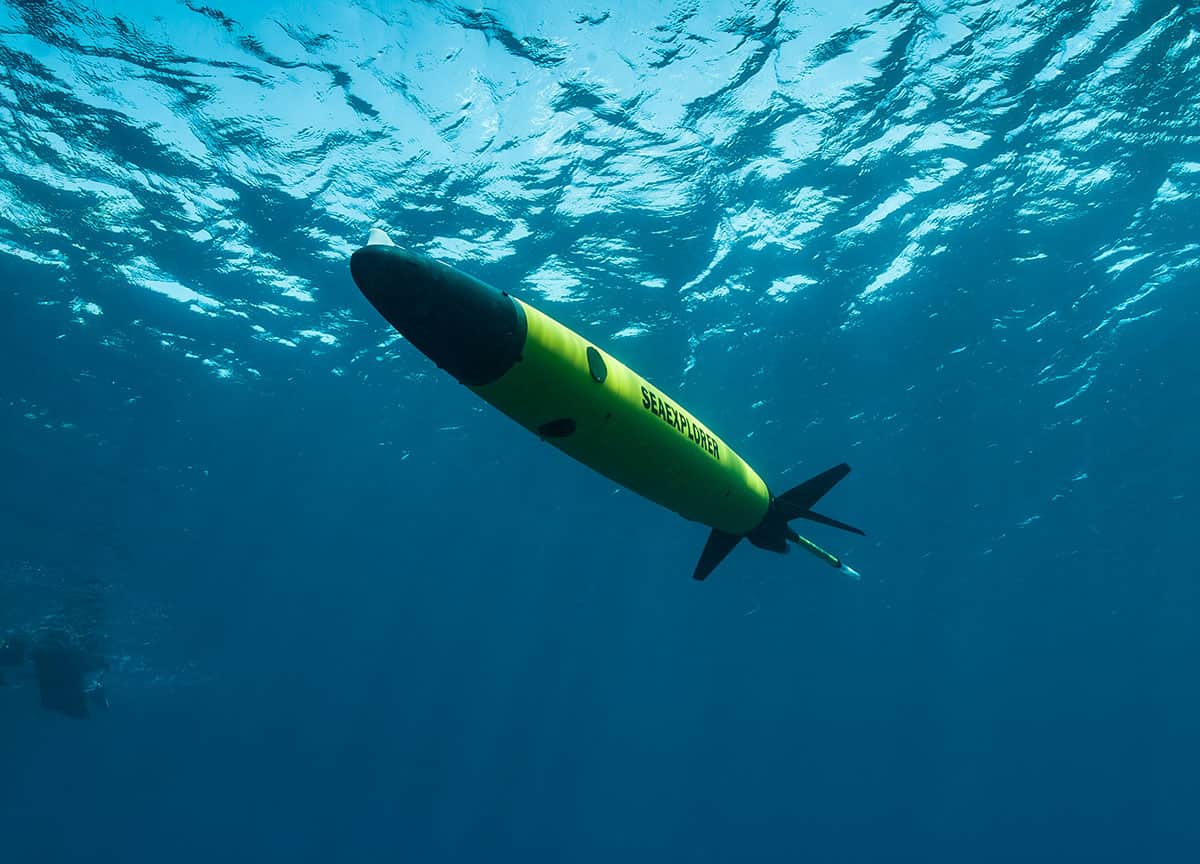
Większość pojazdów AUV jest zasilana akumulatorami, a niektóre mogą również wykorzystywać ogniwa paliwowe lub energię słoneczną. Pojazdy te często wykorzystują napęd elektryczny i silniki odrzutowe do napędzania. Podgrupa pojazdów AUV, znana jako podwodne szybowce, wykorzystuje zmienną wyporności do zmiany głębokości i wykorzystują hydrofoile do przekształcania tego ruchu w ruch do przodu. Podwodne szybowce idealnie nadają się do pobierania próbek takich właściwości jak temperatura i zasolenie w całej kolumnie wody.
Autonomiczny podwodny glider SEAEXPLORER firmy ALSEAMAR
Nawigacja AUV
Autonomiczna nawigacja podwodna musi opierać się na metodach innych niż GPS, ponieważ fale radiowe nie są w stanie przenikać zbyt głęboko pod wodę. Chociaż pojazd może od czasu do czasu wynurzać się na powierzchnię w celu uzyskania sygnału GPS, dane te muszą być uzupełniane przez inne technologie. Morskie systemy nawigacji inercyjnej (INS) mogą być wykorzystywane do szacowania pozycji, przyspieszenia i prędkości, a ich dokładność można poprawić za pomocą dopplerowskiego logu prędkości, urządzenia podobnego do sonaru, które mierzy prędkość przemieszczania się po dnie morskim. Głębokość można zmierzyć za pomocą czujnika ciśnienia.
Envoy AUV firmy Cellula Robotics
Czujniki i ładunki AUV
AUV mogą przenosić szeroką gamę podwodnych czujników i ładunków, które pozwalają im gromadzić dane i mapować środowisko podpowierzchniowe. Mogą to być sonary boczne, sonary jedno- i wielowiązkowe, magnetometry, hydrofony i czujniki chemiczne. Ze względu na brak możliwości wysyłania lub odbierania sygnałów elektromagnetycznych pod wodą, dane są przechowywane na pokładzie w celu późniejszego odzyskania.
XPONENTIAL USA 2026 łączy edukację i networking, umożliwiając profesjonalistom wymianę spostrzeżeń, testowanie założeń i współpracę z rówieśnikami w celu wspierania bardziej świadomego podejmowania decyzji w systemach niezałogowych, autonomicznych i robotycznych.
Cellula Robotics dostarczy zasilany ogniwami paliwowymi pojazd Guardian AUV dla programu CAMP Defense Innovation Unit, współpracując z Metron i liderami branży w celu rozwoju autonomicznych zdolności morskich o dużej wytrzymałości dla operacji obronnych