




GNSS Correction Services
Discover cutting-edge solutions from 4 leading global suppliers
In the following article Daniel Gruver, Director of Product, Point One Navigation, breaks down the strengths and weaknesses of RTK, PPP, & SSR GNSS signal correction methods to help developers choose which solution is best for their needs.

Daniel Gruver, Director of Product, Point One Navigation
GNSS has revolutionized how humans and machines navigate on Earth, and an increasing number of organizations are leveraging positioning data as they develop innovative new applications. For example, autonomous vehicles, robots, logistics fleets, and emergency response systems all use GNSS technology to precisely locate people, things, and places on Earth’s surface and develop routes accordingly.
However, various atmospheric and technological elements often require GNSS signals to be corrected by receivers after they leave a satellite. To mitigate these inaccuracies and any resulting errors in the applications powered by GNSS, several methods have been developed to correct these signals. Each method offers unique advantages and considerations, catering to diverse accuracy requirements and application scenarios, so it’s important to understand them before selecting one.
A Brief Review of GNSS Functionality
GNSS is a satellite-based navigation system that provides absolute positioning and timing information anywhere on Earth. The system consists of a constellation of satellites orbiting the planet, ground control stations, and GNSS receivers. GNSS satellites continuously transmit signals that contain information about their positions and the precise time back to receivers on Earth. To determine its position on the ground, a GNSS receiver picks up these signals and calculates the time it took to travel from the satellite. Using this time calculation and the speed of light, the receiver can then determine its distance from the satellite. By repeating this process and intersecting the distance measurements from multiple satellites, the receiver can then locate its precise position on Earth’s surface.
Top 5 Reasons for GNSS Signal Inaccuracies
Understanding signal errors and what causes them is important when selecting the best GNSS correction method for your particular use case. Various factors contribute to errors in GNSS signals, including ephemeris inaccuracies, satellite clock discrepancies, ionospheric disturbances, tropospheric conditions, and biases between different satellite systems. Distinguishing between these challenges is critical to understanding technology behind correcting GNSS signals to achieve reliable and precise positioning, and selecting which method is best for your needs.
1. Ephemeris errors

Various factors contribute to ephemeris data errors that must be corrected for precise positioning.
One of the inputs GNSS uses to calculate location is ephemeris data. Ephemeris data refers to information about the satellite’s orbital parameters and its position in space. Inaccurate ephemeris data can lead to errors in determining the satellite’s location, affecting the accuracy of GNSS positioning calculations. In other words, if the GNSS does not know exactly where the satellite is, or uses an incorrect location, the intersection of the signals will not be quite right, ultimately limiting the accuracy of the position and time solution.
2. Satellite clock inconsistencies
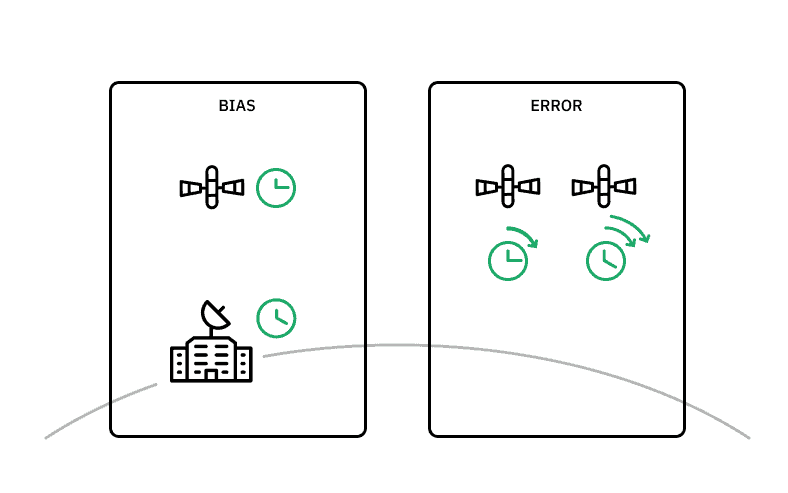
Satellites often have minor differences in their clocks that can result in major positioning inaccuracies.
Despite their highly accurate atomic clocks, satellites can still introduce timestamp errors. Adding another layer of complexity is the incredible speed at which GNSS satellites move (about 7,000 mph). At these speeds, satellite clocks actually run faster in space than they do on Earth. Distance measurement in GNSS relies on precise clock synchronization, as GNSS receivers use timestamps to calculate their distance from a satellite – and any derived positioning. Even a small discrepancy of just a nanosecond can result in significant positioning errors, as this impacts the time the receiver thinks it took the signal to reach the earth.
3. Ionospheric interference
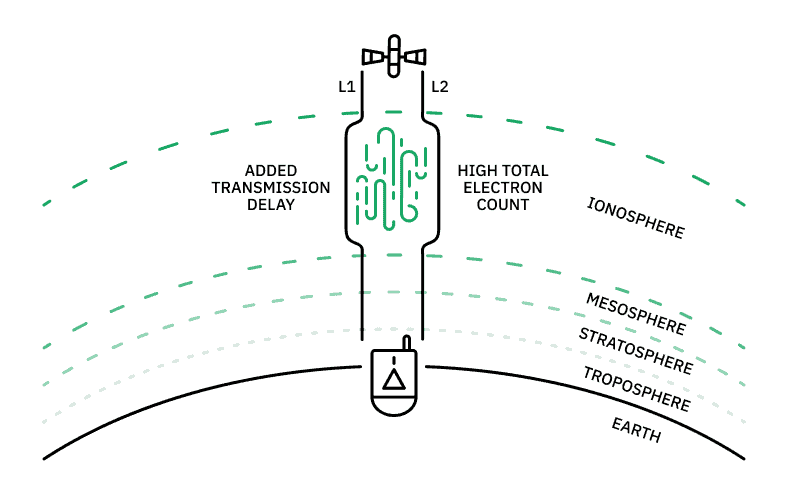
The ionosphere contains charged particles that affect GNSS signals and must be corrected for positioning calculations.
The ionosphere is a layer of the Earth’s upper atmosphere made up of charged particles that can impact the speed of light and radio signals. Changes in the ionosphere caused by fluctuations in solar radiation can introduce errors in GNSS signals, leading to measurement errors that must be corrected in order to derive accurate positioning. While the effects of the ionosphere can introduce major errors in signal interpretation, these errors can be modeled and corrected from a large distance.
4. Conditions in the troposphere
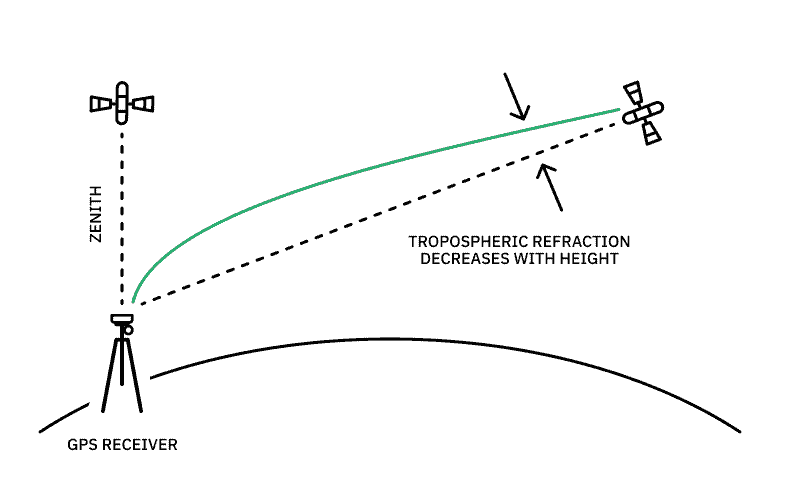
Tropospheric elements impact GNSS signals hyper-locally, requiring specific corrections from a close distance.
The troposphere, the atmospheric layer where weather phenomena occur, can also affect GNSS signals. Variations in temperature, humidity, and atmospheric pressure within the troposphere can similarly alter the speed of light, resulting in errors in GNSS measurements. These tropospheric effects have less of an impact on signal interpretation, but are highly localized and must be modeled and corrected from a relatively close distance.
5. Code bias and group delay
Different satellites have disparate time references and frequencies that contribute to inaccurate positioning calculations.
Finally, different GNSS satellite systems are operated by various countries or organizations, each with its own time reference and frequency. These discrepancies between signals from these different satellite systems, known as code bias or group delay, can also produce errors in signal measurement and GNSS.
GNSS Correction Methods
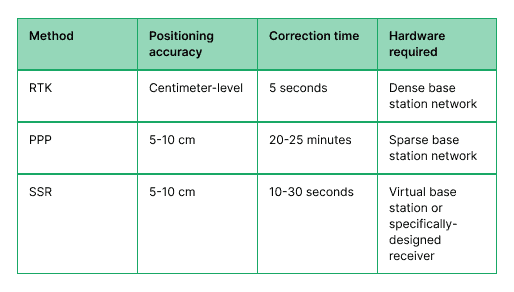
Understanding these sources of error is important when choosing a GNSS signal correction method. RTK, PPP, and SSR all have their own pros and cons depending on what you are using GNSS for, so it’s helpful to know how their specific methodologies can help you optimize for your particular goals.
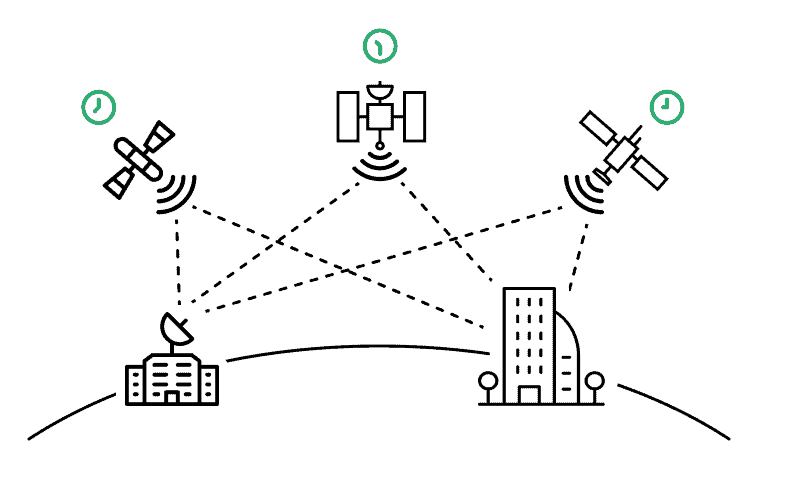
Real-Time Kinematic positioning (RTK)
RTK correction is the classic, gold standard for high-precision GNSS signal correction. This method involves establishing a base station near the target area (typically within a range of 30-50 kilometers) that then provides a reference signal to the receiver, returning precise positioning calculations. Since the reference signal and the GNSS receiver are physically close to each other on Earth, many of the previously mentioned effects do not have a major impact on signals. By comparing these minor signal differences, you can solve for a difference in position between the reference station and GNSS receiver. Since the reference station position is highly accurate, simply adding the difference to the reference station position results in highly accurate GNSS receiver positions.
Although highly accurate, the main drawback of classical RTK solutions is the need for a dense infrastructure of these base stations to enable signal correction at a global scale. This can quickly become quite expensive.
Most ideal for: Autonomous vehicle and consumer navigation in developed areas
Less ideal for: Positioning applications in remote areas, as RTK can be expensive at scale
• • •
Precise Point Positioning (PPP)
PPP uses a different approach by leveraging a limited number of highly precise and accurate stations to correct signals. The algorithm behind PPP splits the correction responsibility between these stations and GNSS receivers. First, the PPP stations model the various known error sources within the GNSS system, such as ephemeris inaccuracies, clock discrepancies, and group delay. This information is then sent to GNSS receivers to perform further calculations on local conditions and close the error. GNSS receivers combine the signal data they have collected over time with the known error sources provided by the PPP stations to measure both universal and localized errors (such as ionospheric and tropospheric effects), ultimately calculating how much signals need to be corrected.
While this correction method offers high accuracy, the scarcity of PPP stations results in slower signal correction time. For example, signal correction can take about 20-25 minutes. Under extremely difficult conditions, the solution may take even longer to converge to the correct answer since the receiver needs to calculate both the ionospheric and tropospheric effects entirely on its own.
Most ideal for: Heavy equipment and similar applications that can wait for hyper-precise positioning information, or operate in areas where RTK service may not be feasible, such as in water or remote locations.
Less ideal for: Consumer GNSS, autonomous vehicles, and other applications requiring instant positioning information.
• • •
State Space Representation (SSR)
SSR is the bleeding edge of GNSS signal correction technology. Not only does SSR provide the ephemeris, clock, and code bias discrepancy data that PPP offers, it also delivers information about more localized ionospheric and tropospheric interferences.
However, many GNSS receivers do not know what to do with all of this data, or how to convert it into meaningful positions. To accommodate for this, SSR data can be converted into a virtual base station (VBS), essentially simulating a RTK base station for legacy receivers. This innovative approach enables the utilization of SSR data even with conventional GNSS receivers, making high-precision positioning more accessible.
Most ideal for: The automotive and robotics industries, and users with low-level access to the GNSS hardware that can integrate the needed support software
Less ideal for: Teams using generic receivers
Selecting the Right GNSS Correction Solution
RTK, PPP, and SSR all have advantages and disadvantages that must be considered when selecting a GNSS correction method.
Different methods for correcting GNSS signals offer varying levels of accuracy and suitability for specific applications. But to serve the increasing demands of organizations using GNSS for applications requiring only the most precise positioning, all correction methods must be scalable, efficient, and accurate.
Point One manages a network of over 1,440 global base stations, including more than 900 in the US. This network is expanding every month based on user demand to deliver centimeter-level GNSS signal corrections wherever they are needed – even in areas without cellular coverage.
Using this robust network, Point One has developed a suite of GNSS correction products to meet the needs of diverse organizations, ranging from classic RTK to SSR and in between.
Polaris RTK
Point One’s Polaris RTK solutions provide developers with the high-precision GNSS signal corrections anywhere in the world without needing to manage their own base stations. Any GNSS receiver compatible with RTK can make centimeter-level corrections in a matter of seconds, resulting in high-precision positioning data for applications requiring both speed and accuracy.
- Positioning accuracy: centimeter-level
- Correction speed: <5 seconds
- Receiver required: Any RTK compatible receiver
Polaris SSR
Polaris SSR solutions combine Point One’s extensive network of global RTK base stations with the bleeding edge of SSR technology, filling in the gaps normally requiring the creation of a VBS. Any RTK compatible receiver can leverage the world’s densest RTK network to make 5-10 centimeter corrections in just 30 seconds or less, more than 80x the speed of traditional PPP solutions.
- Positioning accuracy: 5-10 centimeters
- Correction speed: <30 seconds
- Receiver required: Any RTK compatible receiver
Polaris VBS
For teams that want a mix of classic and bleeding edge without setting up their own VBS, Point One’s Polaris VBS solutions enable generic receivers to make accurate signal corrections. Any GNSS receiver can communicate with Point One’s VBS network to make 5-10 centimeter level corrections in around 15 seconds, making it ideal for teams optimizing for speed with a legacy receiver.
- Positioning accuracy: 5-10 centimeters
- Correction speed: <15 seconds
- Receiver required: Generic receiver
Learn more about Polaris Correction Solutions
As technology continues to advance, GNSS signal correction methods are also evolving, making high-precision positioning more accessible and reliable across a wide range of applications. Point One’s comprehensive suite of correction solutions provide developers with the most flexibility for correcting GNSS signals, delivering the fastest, highest-accuracy corrections at scale.
To figure out which GNSS signal correction method is best for your application, get in touch with a Point One expert.
About the Author: Daniel is Point One’s Director or Product, focusing on navigation, instrumentation, and platforms. He has almost twenty years of experience in the navigation field, starting as a Research Engineer at SRI International in 2005. Prior to Point One, Daniel worked on remote sensing systems for mapping, navigation, and autonomy. Daniel holds a B.S. in Engineering from Harvey Mudd College.












