




Underwater Inspection Robotics
Discover cutting-edge solutions from 12 leading global suppliersBathymetric surveys, a type of hydrographic survey, are conducted to map underwater terrains, showing the depth and features of land beneath water surfaces. Read more >>

Tersus GNSS provides an integrated solution in its high-performing unmanned surface vehicle (USV), Tersus TheDuck™.
Featuring a single-beam echo sounder, TheDuck™ delivers an efficient and portable solution for bathymetric surveys across various environments, including rivers, lakes, reservoirs, and coastal zones.
Its advanced design and user-friendly features make it an essential tool for professionals in bathymetry, providing high precision in positioning and depth data collection.
TheDuck™ can integrate an Oscar-TAP GNSS receiver with PPP functionality, making it ideal for use in rivers, lakes, and offshore areas with limited or poor network connectivity.
Equipped with an optional single-beam echo sounder (100 meters at 455 kHz or 300 meters at 200 kHz), TheDuck™ offers flexibility for various bathymetric needs.
Key Bathymetric Survey Methods
Sounding poles and hand lead lines were the earliest tools for bathymetric mapping. While they provide accurate depth data, this method is inefficient, offering limited coverage between individual measurements. However, it remains valuable in environments where sonar equipment is less effective, such as in dense aquatic vegetation or shallow areas.
Both single-beam and multibeam bathymetry use sonar technology, significantly enhancing bathymetric precision and efficiency. Although multibeam sounders are more accurate, higher in resolution, and more efficient than single-beam sounders, they are also costly. Consequently, single-beam sounders continue to be widely used in practice.
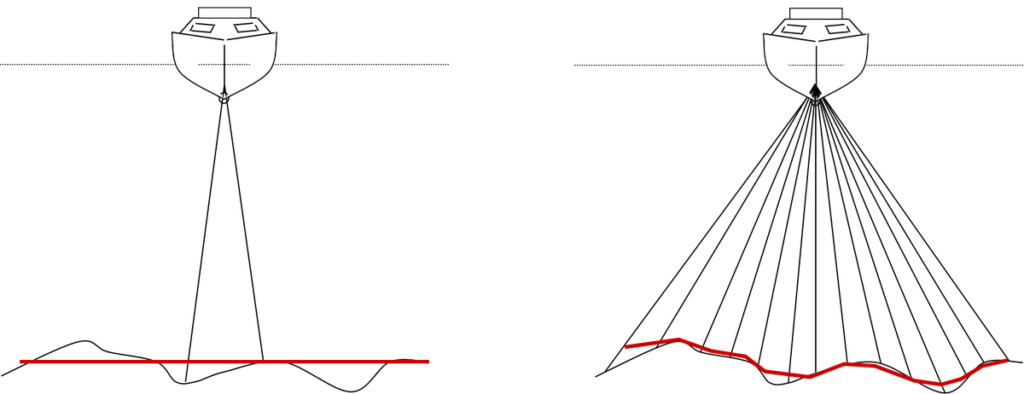

Single-Beam Echo Sounders
Single-beam echo sounders operate by emitting brief acoustic pulses vertically downward from a transducer. When these pulses hit the seabed, they reflect back, and the echoes are captured by the transducer.
The depth is calculated using the time it takes for the sound waves to travel to the seafloor and back, along with the average speed of sound in water.
- D: Distance between transducer and seafloor
- C: Average speed of sound in water
- T: Two-way travel time of sound wav
A single-beam echo sounder setup typically consists of several key hardware and software components, including a GNSS positioning system; the single-beam echo sounder itself; and a control, data acquisition, and processing system.
Single-Beam USV Bathymetric Systems
Currently, USV systems such as Tersus TheDuck™ are extensively used in underwater topography mapping for rivers, lakes, and reservoirs, valued for their lightweight, efficient, and smart operation.
In this setup, the USV is equipped with high-precision sensors that coordinate to maintain a uniform speed along a predetermined route, with GNSS assisting in navigation.
The depth measurement system, utilizing single-beam bathymetry, gathers water depth data at specified intervals or distances, while GNSS provides the horizontal coordinates of each measurement point.
The inertial measurement unit (IMU) collects the USV’s orientation data, with communication tools transmitting positioning, bathymetric, and attitude data in real time to a data center. This enables technicians to monitor data collection remotely.
Read the original article here >>












