Showcase your capabilities
If you design, build or supply Video Encoders, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Video encoders are critical subsystems that convert high-bandwidth sensor output into compressed digital streams for transmission, storage, and real-time processing in unmanned systems. Deployed across UAVs, UGVs, and maritime platforms, these solutions include standalone units, embedded boards, software-based implementations, and hybrid architectures.
This page showcases leading drone encoder suppliers and manufacturers of UHD video encoders for unmanned systems, enabling ISR, teleoperation, and persistent surveillance.
Read the Technology Overview








Mission-Critical Video Transmission & Streaming Solutions for UAVs & Ground Robotics

Edge AI Video Processing & Streaming Solutions Providing Real-Time Situational Awareness for Mission-Critical UAVs & Unmanned Systems

Ultra-Low-Bandwidth Real-Time Video Streaming Solutions for UAVs, Unmanned & Robotic Systems

UAS Video Streaming Technology: Secure, Low-Latency, Live Video Streaming and Transmission Solutions

Industrial-Grade Embedded Computer Systems for AI Edge Computing & Machine Learning

UAV Antennas, Tracking & Video Solutions for Mission-Critical Connectivity, Real-Time Visibility, & Robust Communications

High-Performance Video Graphics, GPGPU, AI/ML Processing & Display Solutions for C5ISR Applications

If you design, build or supply Video Encoders, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Video encoders for drones and unmanned systems are critical subsystems that convert high-bandwidth raw video from onboard sensors into a compressed digital format. This process is essential for making data manageable for transmission over wireless links, storage, or real-time edge processing. In modern operations where 4K video and multi-sensor payloads are becoming standard, the encoder reduces data volume while preserving the tactical details necessary for decision-making. Operating within a tightly integrated chain of mission computers and RF datalinks, the encoder directly impacts system-wide latency and the reliability of the intelligence derived from the feed.
Some systems also provide video decoding capabilities, supporting end-to-end handling of compressed video between unmanned platforms, ground stations, and command systems.
Tyton VS2X Rugged Video Encoder by EIZO
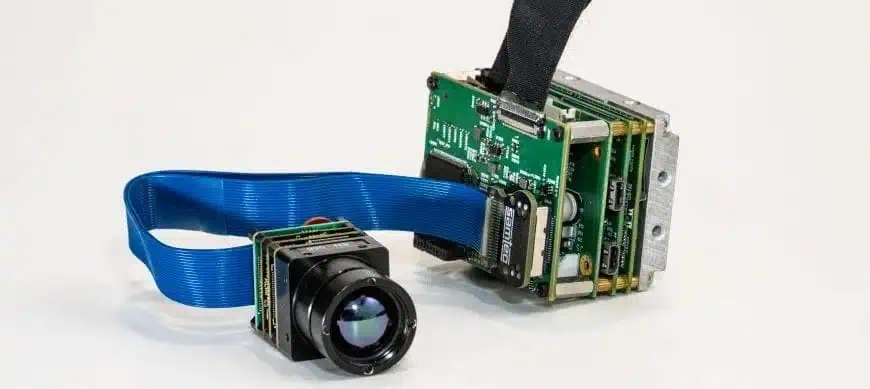
Standalone video encoders are self-contained devices designed for integration as discrete modules within a platform payload. These units typically include dedicated processing hardware, multiple interfaces, and onboard firmware optimized for deterministic performance. They are ideal for retrofit scenarios or modular architectures where rapid integration and physical protection are priorities.
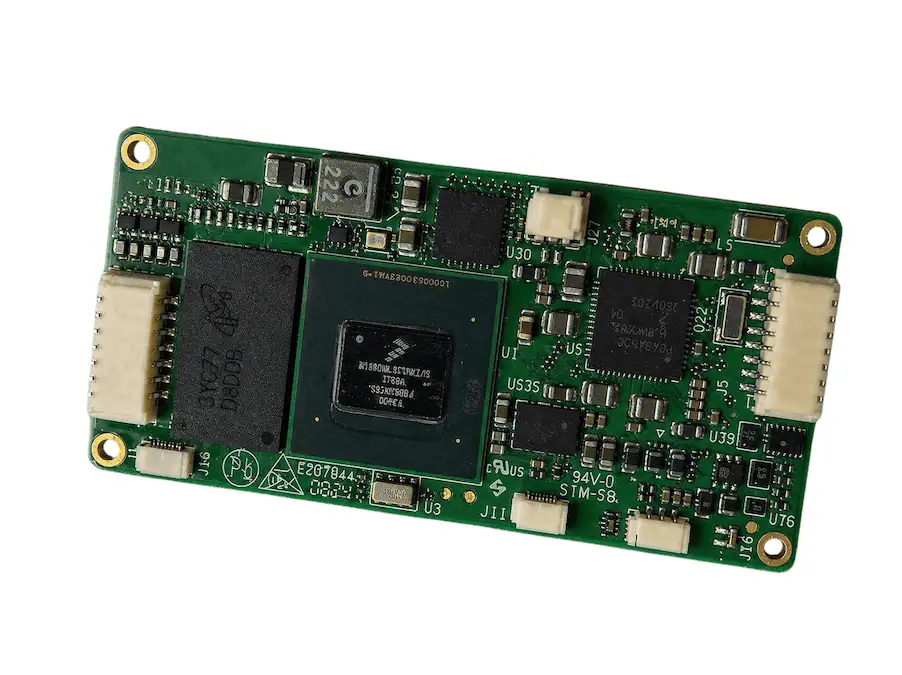
Embedded video encoder boards are designed to be integrated directly into a larger system such as a payload gimbal or processing chassis. These boards offer tight coupling with camera sensors, minimizing latency and reducing cabling complexity. Their compact footprint and low power consumption make them well-suited to SWaP-constrained platforms.
Software-based encoders run on general-purpose processors within onboard computing systems. While offering flexibility and ease of updates, they are dependent on available CPU or GPU resources shared with other mission tasks. This approach is common in platforms where video processing is combined with broader computational workloads.
Hybrid solutions combine dedicated hardware acceleration with software control layers to balance efficiency and scalability. These systems leverage hardware engines for compression tasks while retaining software configurability for mission-specific protocols. This approach is particularly effective in complex systems with evolving requirements.
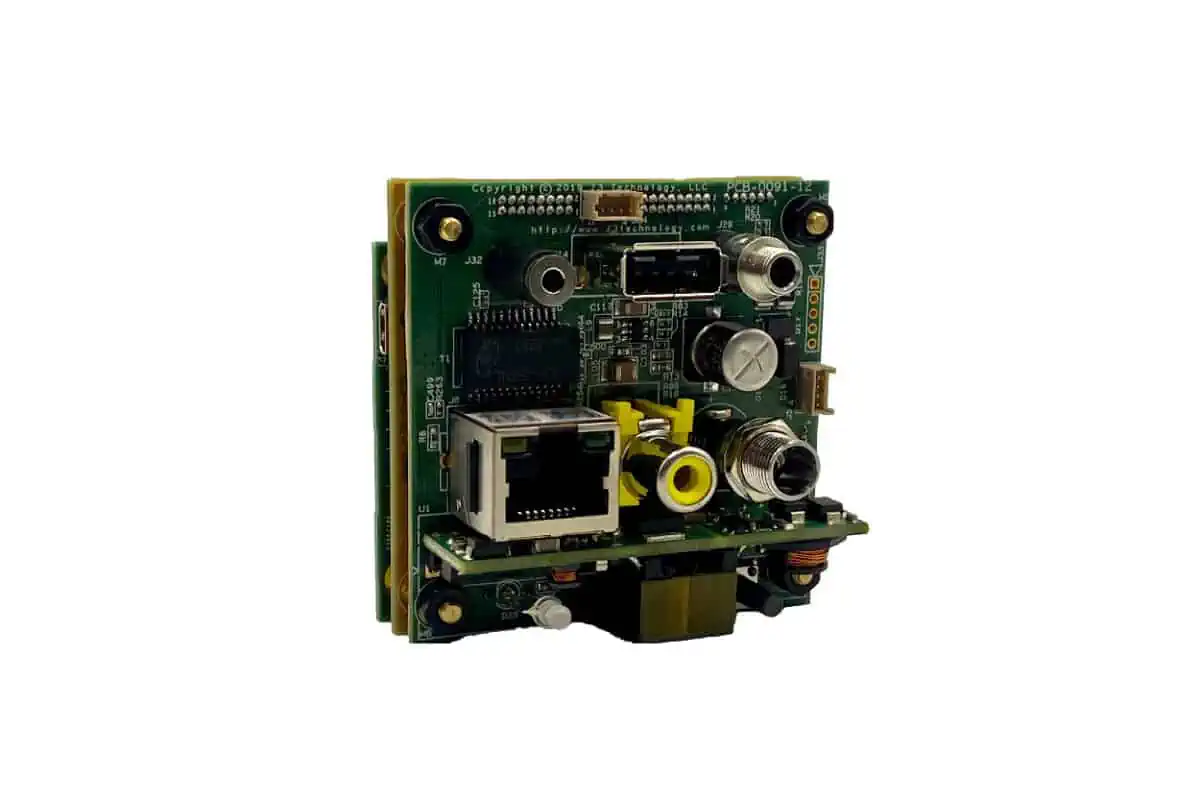
FSDI-13A Dual Camera Full 3G-SDI Encoder by Z3 Technology
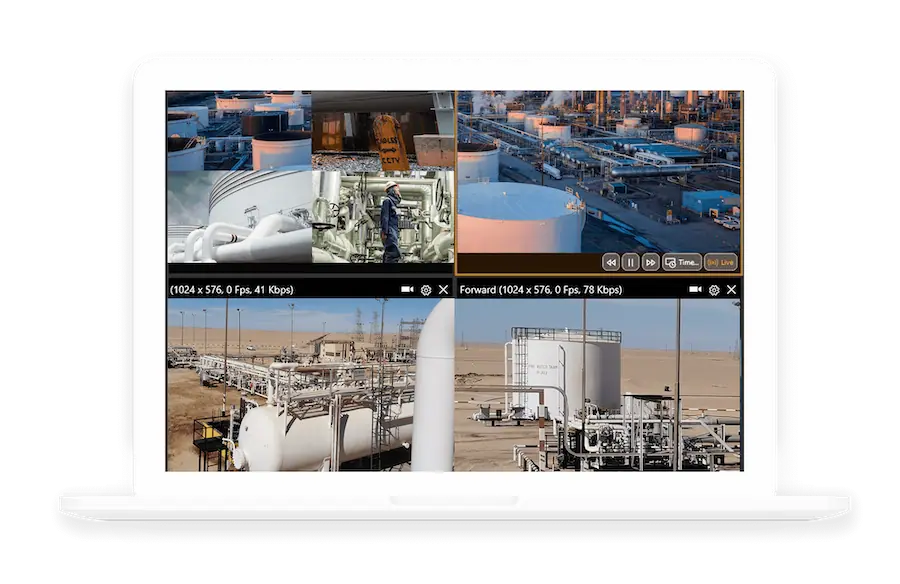
In ISR missions, drone encoders enable the continuous transmission of high-resolution imagery from airborne platforms to ground stations. Low-latency and efficient compression are essential to ensure that operators can identify and respond to targets in real-time. The feed must remain stable during high-speed maneuvers to ensure consistent situational awareness.
For Unmanned Ground Vehicles (UGVs), rugged video encoders provide operators with the visual feedback required for navigation and manipulation. Teleoperation demands consistent frame delivery and minimal delay to maintain precise control in complex or obstructed terrain. Low lag is vital to prevent accidents when the vehicle is operating near obstacles.
Maritime and subsea platforms such as Unmanned Surface Vehicles (USVs) rely on high-performance encoders to transmit imagery through constrained channels. These environments require robust encoding strategies to cope with limited bandwidth and high-latency conditions during subsea inspections. Efficient data management ensures that clear imagery is available despite the challenges of underwater transmission.
Fixed and mobile unmanned systems used in border security depend on encoded video streams for continuous monitoring of remote sectors. Efficient compression allows long-duration surveillance without overwhelming communication infrastructure or storage capacity. The encoder must maintain high detail levels to allow for accurate target identification over long distances.
Engineering unmanned systems requires a focus on several performance metrics that ensure the platform remains viable in the field.
These requirements dictate the physical and logical design of any encoding solution intended for professional use.
Modern 4K encoders rely on standardized algorithms to reduce data rates for efficient wireless transmission. H.264 remains widely deployed for its compatibility, while H.265/HEVC and emerging H.266/VVC offer superior compression at the cost of higher processing demand. Selecting the right standard involves balancing platform power against the available bandwidth of the communication link.
Intra-frame encoding compresses frames independently, offering lower latency and higher resilience to packet loss. Inter-frame encoding exploits temporal redundancy to achieve higher compression efficiency, which is ideal for saving bandwidth on limited links. Engineers should decide if their priority is absolute stream stability or maximum data efficiency.
Constant Bitrate (CBR) encoding ensures predictable bandwidth usage, which is critical for fixed-capacity tactical RF radios. Variable Bitrate (VBR) encoding adapts to scene complexity to improve quality, though it requires more careful bandwidth management to avoid link saturation. Most live unmanned operations utilize CBR to ensure the feed never exceeds link capacity.
Higher resolutions and frame rates improve situational awareness but significantly increase the data rates required. Encoding systems must balance these parameters based on mission requirements, often scaling resolution dynamically as the platform moves. A mission may prioritize 4K resolution for identification or higher frame rates for smooth navigation feedback.
The underlying hardware architecture defines how efficiently an encoder can process high-resolution data while remaining within power limits.
Selecting the appropriate architecture depends on the specific computational and power budget of the unmanned platform.
Video encoders support a range of input interfaces to accommodate different sensor types found in modern payloads. High-bandwidth digital video encoder interfaces such as HD-SDI and MIPI CSI are common in professional gimbals, ensuring raw data reaches the encoder with zero signal degradation. Proper selection ensures the payload remains lightweight while maintaining high signal integrity.
Encoded video is transmitted using protocols that determine how data is packetized and handled across the wireless link. While RTSP is common, SRT (Secure Reliable Transport) is now preferred for unmanned systems because it maintains integrity over lossy networks. These protocols allow the system to handle network congestion while keeping the video feed viewable.
Video encoders are often integrated with onboard processing systems that manage sensor fusion and complex mission logic. This ensures efficient data flow and allows the mission computer to adjust encoder settings based on real-time environmental feedback. Centralized architecture helps the platform manage its limited energy and computational resources more effectively.
Encoded video must be compatible with the platform communication links and ground infrastructure to ensure users can view the feed. This requires adherence to standards like MISB and KLV metadata injection, which synchronize telemetry data with the video frames. This interoperability allows the system to work seamlessly within a broader tactical network.
Video decoders receive compressed video streams from the encoder and convert them back into displayable video for ground control stations, command centers, remote operators, or recording systems. Decoder compatibility is important for H.264, H.265/HEVC, 4K feeds, low-latency streaming, metadata handling, and protocols such as RTP, RTSP, UDP, and SRT.
Video encoder and decoder systems may be combined within the same hardware family or module. This allows compressed video to be transmitted from onboard sensors and then decoded for display, analysis, recording, or redistribution at the ground control station or command center.
Effective transmission over long distances requires the encoder to act as an active participant in managing the communication link.
Robust transmission strategies ensure that the video remains a reliable tool for operators even in challenging link environments.
Video encoders must ensure that only trusted firmware is executed, preventing unauthorized modification of hardware behavior. By verifying digital signatures during the boot process, the system protects itself from malicious actors attempting to gain control. This foundational security measure is essential for maintaining trust in sensitive industrial and defense operations.
End-to-end encryption protects video streams during transmission, safeguarding operational data through AES-128 or 256 standards. This process occurs within the encoder hardware to ensure data is protected from the moment of compression until it reaches the ground station. Without encryption, a video feed could be intercepted, compromising mission security.
Systems implement authentication and anti-spoofing mechanisms to ensure the integrity of both video data and control signals. These features prevent attackers from injecting false video feeds or hijacking the sensor control link. As unmanned systems take on high-stakes roles, these cybersecurity measures have become as vital as encoding performance.
The evolution of unmanned systems is driving the development of more intelligent and responsive encoding technologies.
These trends indicate a shift toward autonomous, data-centric video pipelines that provide more than just a visual feed.

 Searching Companies & Products
Searching Companies & Products

 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.