If you design, build or supply Autonomous Ground Vehicle Autopilots, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
Cutting-edge hardware and software solution for autonomy at scale
Cutting-edge hardware and software solution for autonomy at scale
...les into fully autonomous and ultra-reliable workhorses. The platform-agnostic system consists of a... ...aracterize the vehicle’s environment, detecting obstacles, road features, and environmental...
Autonomous Ground Vehicle (AGV) autopilots provide a real-time computational core for unmanned and optionally manned land platforms. Handling vehicle dynamics, precision navigation, and high-level autonomy, these systems translate complex mission intent into deterministic commands for steering, braking, throttle, and motion.
Unlike consumer-grade robotics controllers, professional AGV autopilots are engineered for safety-critical operations on ruggedized platforms. They are built to maintain stable, predictable behavior while navigating uneven terrain, sensor degradation, and contested electromagnetic environments.
Understanding the AGV Autopilot
An AGV autopilot is a real-time embedded control system that governs vehicle motion and autonomy. It executes closed-loop control of vehicle actuators by integrating high-fidelity navigation data, perception outputs, and operator inputs. The autopilot ensures that the platform follows planned trajectories with high precision, remains dynamically stable, and transitions seamlessly between operational modes.
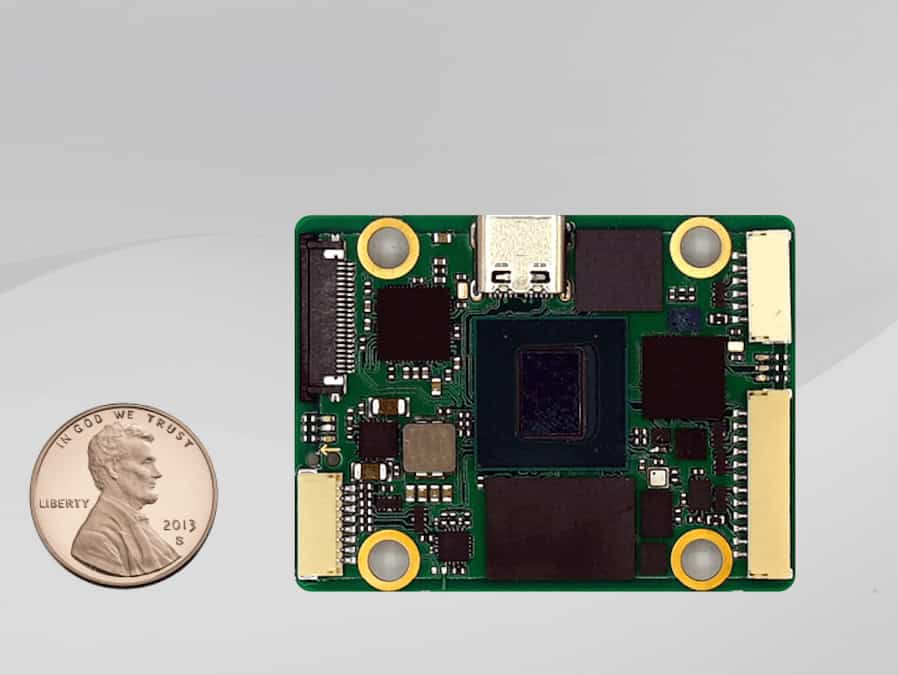
Cube Orange+ autopilot for autonomous ground vehicles and robotics by CubePilot.
In practice, the autopilot is the “driver” of the system. Whether the platform is operating via teleoperation, semi-autonomously, or with full autonomy, the autopilot remains the authoritative control layer, ensuring that the vehicle operates within its physical and safety limits.
Autopilot vs. VCU vs. Mission Computer
In the context of ground vehicle computing, roles are often conflated, but the autopilot occupies a specific niche:
Vehicle Control Unit (VCU): Manages low-level actuation, powertrain health, and energy distribution.
Autopilot: Acts as the bridge. It consumes navigation goals and perception data from the mission computer and converts them into real-time control strings for the VCU or drive-by-wire system to execute.
In highly integrated unmanned ground systems, the autopilot and VCU functions may reside on the same hardware, yet the motion-control and autonomy logic remain functionally isolated to ensure system integrity.
Core Functions of AGV Autopilot Systems
Vehicle Dynamics and Motion Control
The heart of the system is a real-time control engine governing vehicle physics. This requires deep integration with specific kinematics, including:
Ackermann Steering: Standard for wheeled vehicles.
Skid-Steer: Used for tracked or differential-drive platforms.
Articulated Steering: Common in heavy industrial or agricultural equipment.
Control algorithms must adapt to varying speeds. Low-speed tasks require extreme resolution for docking and obstacle negotiation, while high-speed operations prioritize stability, slip management, and active rollover prevention.
Navigation and Localization
Reliable localization is the foundation of an autonomous land vehicle. Autopilots typically fuse GNSS and RTK positioning with inertial navigation systems (INS) and wheel odometry. In GNSS-denied or contested environments, the autopilot must transition to dead reckoning, map-matching, or perception-aided navigation to maintain its state estimate.
Path Planning and Trajectory Generation
Autopilots manage both global and local planning. While global planning sets the route, local planning continuously adjusts for dynamic obstacles and terrain constraints. Advanced systems are “terrain-aware,” allowing the vehicle to automatically reduce speed for rough ground or avoid slopes that threaten lateral stability.
Real-Time Autonomy Management
Many autopilots offer advanced monitoring of vehicle health and safety. These systems enforce “graceful degradation” – if a sensor fails or confidence intervals drop, the system should automatically reduce performance or initiate a fail-safe halt rather than continuing blindly.
Sensor Integration and the Perception Stack
AGV autopilots may be tightly coupled with a multi-modal perception suite, with capabilities including:
LiDAR and Radar: For long-range obstacle detection and 3D mapping.
CoreX ground vehicle autonomy stack by SteerAI.
EO/IR Cameras: For situational awareness and visual odometry.
Ultrasonic Sensors: For close-range proximity alerts.
While the “perception stack” may run on specialized AI hardware, the autopilot consumes the resulting object tracks and occupancy grids to make real-time maneuvering decisions.
Autonomous ground vehicle control increasingly relies on integrated perception stacks that combine sensor inputs with navigation and control logic. SteerAI’s CoreX reflects this approach, using cameras, LiDAR, and radar alongside AI-powered navigation software to detect obstacles, interpret terrain and support positioning in GNSS-denied environments. The solution illustrates how modern AGV autopilot functionality is expanding to incorporate perception, localization, and intelligent decision-making within a unified autonomy architecture.
Hardware and Software Architecture
Deterministic Hardware
Hardware is chosen for reliability and deterministic timing. While modern units may include GPUs or AI accelerators for vision tasks, the safety-critical control loops often run on dedicated, real-time microcontrollers. Common interfaces include CAN-FD, automotive Ethernet, and ruggedized MIL-SPEC connectors.
Software and OS
The software stack typically sits on a Real-Time Operating System (RTOS) to guarantee bounded latency. While middleware like ROS 2 or DDS is common for prototyping and data exchange, many defense-grade systems utilize hardened, proprietary frameworks to meet strict certification requirements.
Deployment and Market Landscape
AGV autopilots are deployed across three primary sectors:
Defense: Enabling logistics resupply, ISR, and EOD in high-risk zones where GNSS denial is expected.
Industrial: Powering mining, agriculture, and port automation where repeatability and 24/7 endurance drive ROI.
Security & First Response: Facilitating remote inspection in hazardous or urban environments.
The market offers a choice between “black box” proprietary systems and open architecture solutions. Open systems are increasingly favored for long-term programs as they reduce vendor lock-in and simplify the integration of third-party sensors and mission logic.
Future Trends
The industry is seeing a shift toward AI-driven adaptation, where the autopilot can “learn” optimal control strategies for shifting soil conditions or complex urban interactions. Furthermore, there in an increasing emphasis on greater human-machine teaming (HMT) standards, ensuring that autonomous platforms can be managed intuitively by operators with minimal training.
SteerAI details a phased framework for adopting autonomous vehicle operations, covering operational design, readiness assessment, and scalable deployment to deliver measurable value across logistics and defense
Embention has opened a new manufacturing site in the United Arab Emirates, expanding its global presence and enhancing production capabilities for its drone and eVTOL technologies to improve delivery times and operational efficiency
WeRide’s autonomous Robobus shuttle service has been launched at Sentosa in Singapore, with a route spanning 1.2 kilometers and four stops along the way
WeRide's Robotaxis can serve 1-3 passengers at a time operating from 9am to 5pm, covering popular destinations such as subway stations, residential areas, offices and industrial parks
Stratom’s Summit Off-Road Autonomy Platform is a highly configurable software system that accelerates the implementation of unmanned systems to boost operating efficiency and profitability
IHI Corporation of Japan has chosen AdaCore’s QGen Model Verifier, a part of its QGen model-based engineering toolsuite, along with AdaCore’s expert support,...
Dec 22, 2021
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.