If you design, build or supply Real Time Operating Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
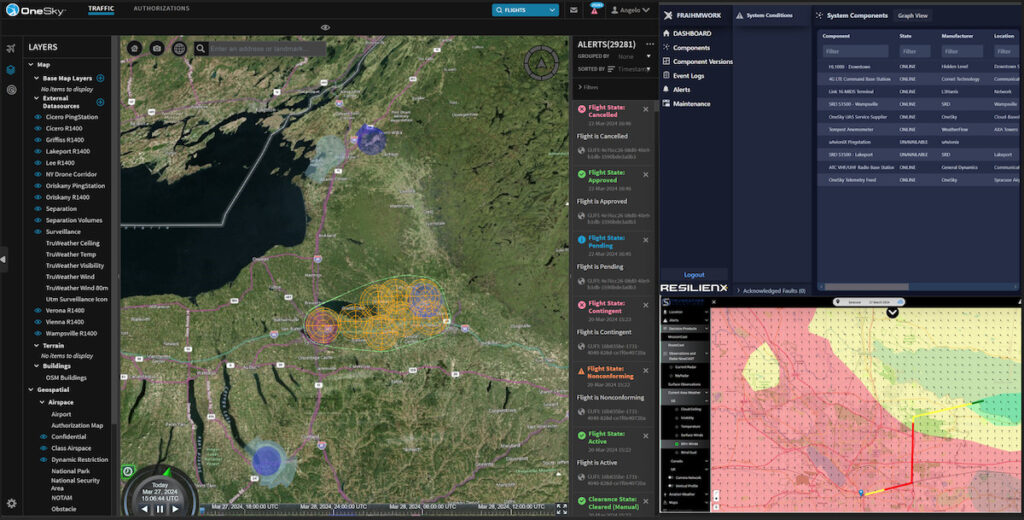
Digital operations center for safe & scalable UAS & AAM integration
Digital operations center for safe & scalable UAS & AAM integration
......a feeds, enabling the integration of UAS and eVTOL platforms into National Airspace Systems... ...regional BVLOS systems, counter-UAS, drone-in-a-box networks, and disaster response, AAM OptiX™...
A real-time operating system (RTOS) is an operating system that provides precise time constraints for the execution of tasks, enabling it to be much more predictable than general-purpose operating systems.
RTOSes are divided into two general categories – soft and hard. Hard real-time operating systems are much more consistent with the time taken to complete a task, whereas soft RTOSes have more variability. It may also be acceptable for soft RTOSes to provide a late result, whereas this cannot happen with a hard RTOS.
Determinism
Real-time OS use a task scheduler that allows a priority to be assigned to tasks, ensuring that tasks with a higher priority are executed first. This enables the operating system to achieve one of the key characteristics of a real-time OS – determinism, or the ability to always provide the same output for a repeated input. General-purpose OSes typically schedule tasks to achieve maximum throughput, whereas for RTOSes, speed and predictability of response are considered more important.
RTOSes are usually more compact and streamlined than general-purpose OSes, enabling them to be quick and efficient and resulting in lower probability of a crash due to focusing on a narrower set of tasks. They may be installed on embedded systems, and support multi-core and multi-threaded processors and architectures such as Intel or PowerPC.
UAV & Drone Operating Systems
UAV and drone real-time operating systems control many safety- and mission-critical aspects of the vehicle’s operation, including avionics, flight control and weapons systems. In order for the platform to be certifiable, the drone RTOS may be required to conform to particular aviation software standards, such as DO-178B/C.
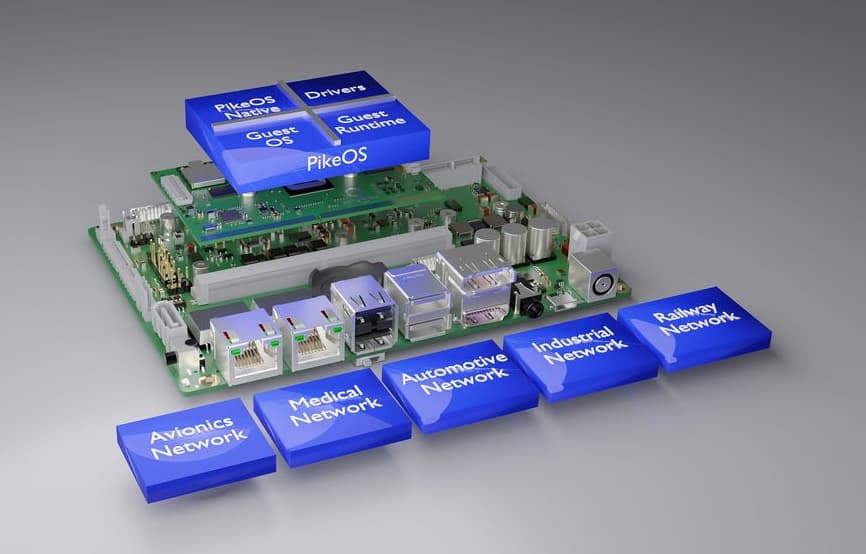
UAV RTOSes may be used in conjunction with a separation kernel hypervisor, which provides a secure environment within which multiple dissimilar operating systems can be run on one physical hardware platform. This allows designers to partition systems into smaller independent components, and to allow safety and non-safety critical components to be securely separated.
ResilienX has entered an agreement with GrandSKY to provide engineering integration and operational modeling support for Project ULTRA, focusing on advancing unmanned aircraft systems within the national airspace system
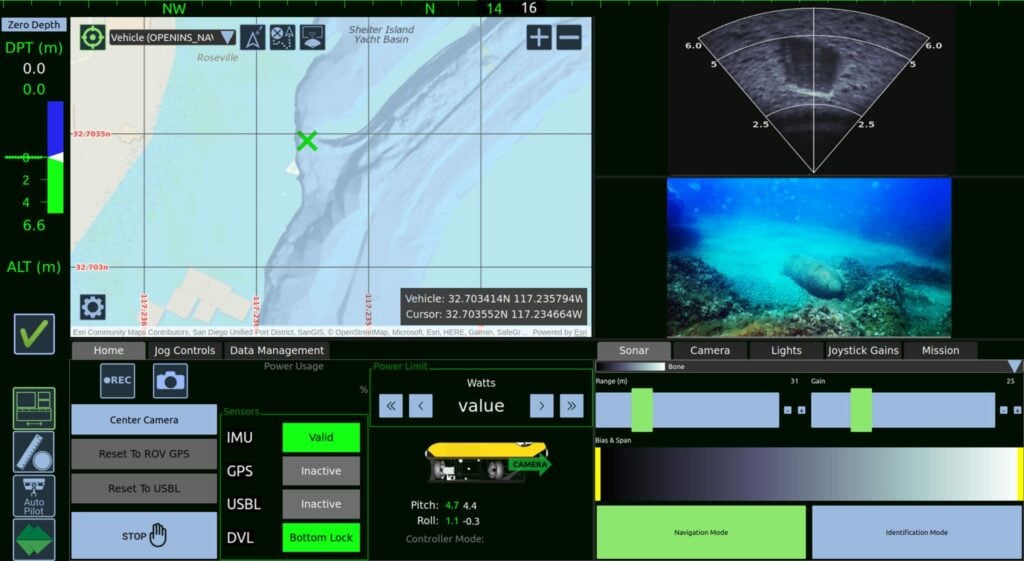
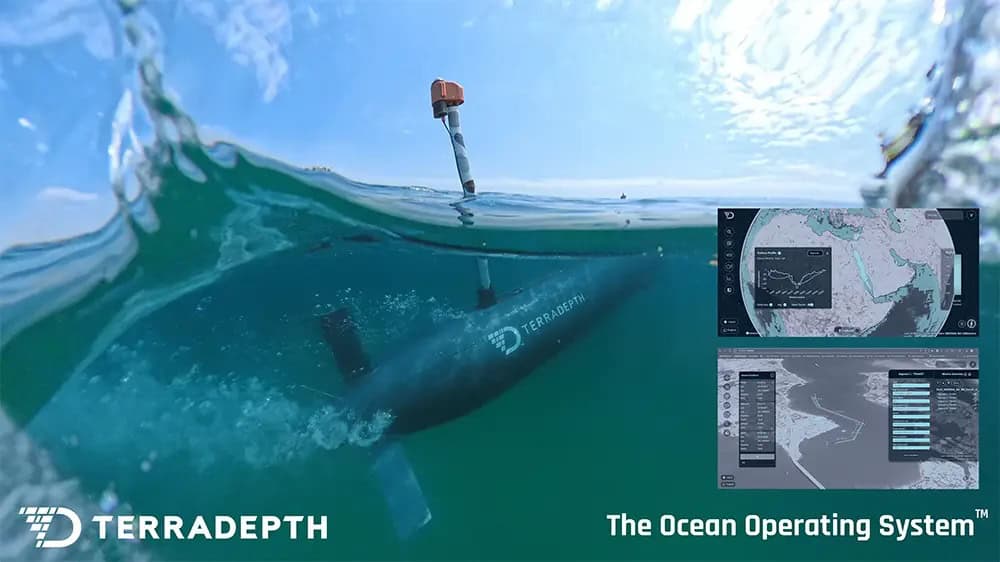
Terradepth’s Absolute Ocean platform has entered the NIWC Atlantic RCC Hopper, allowing the U.S. Navy to immediately deploy advanced edge-to-cloud data solutions for maritime superiority
ResilienX has partnered with NASA to demonstrate preflight planning tools that deliver predictive risk assessments, supporting safer drone and advanced air mobility operations
ResilienX addresses the challenge of scaling Beyond Visual Line of Sight (BVLOS) operations by improving safety, interoperability, cybersecurity, and regulations, advancing uncrewed aircraft systems and advanced air mobility integration
ResilienX, together with its AAM OptiX™ partners, will reveal its advanced digital operations center for uncrewed and urban air mobility during a demonstration at AUVSI XPO24
XTEND and ModalAI will introduce autonomous mission critical drones powered by XTEND's XOS operating system and ModalAI's VOXL 2 Autonomous AI Autopilot
XTEND has announced a partnership with SightX that will boost on-board data processing for drones, robots, and smart devices using XOS, the human-guided autonomous operating system
The combination of Performance Rotors' drones and robotics, and XTEND's award-winning XOS operating system, will make human-guided, remote interactive operations possible in a range of industrial inspection scenarios
Congatec has entered into a partnership with SYSGO, a developer of real-time operating systems (RTOS) for safety and cybersecurity applications....
Nov 25, 2021
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.