




LiDAR Software
Discover cutting-edge solutions from leading global suppliers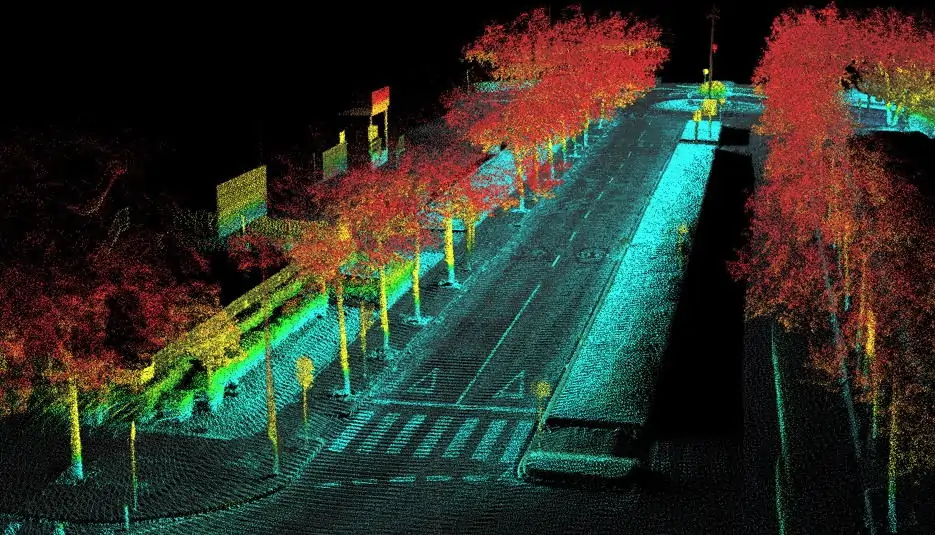
OxTS, a developer of inertial sensing solutions for UAVs (unmanned aerial vehicles) and robotics, has announced the release of OxTS Georeferencer. The new software application is designed to boresight and georeference LiDAR data in conjunction with the company’s INS (inertial navigation system) product range to generate accurate 3D pointclouds.
OxTS Georeferencer is intended for users of any manned or unmanned surveying or mobile mapping vehicles, and includes two main features; an automatic boresight calibration algorithm and a basic georeferencing function that outputs an LAS pointcloud.
The boresight calibration method can be used to intelligently calculate the boresight misalignment between a LiDAR and INS device, while the georeferencing function can synchronise and fuse a LiDAR and INS data set to generate a pointcloud in the popular LAS format.
Version 1 of the software features compatibility with the Velodyne VLP-16 LiDAR sensor as well as all OxTS INS, with more LiDAR models added in future releases. Visit OxTS’ Georeferencer product page to download the software as well as to see a demonstration of the effects of boresight calibration on a UAV using an xNAV550 and Velodyne VLP-16.












