Find suppliers and manufacturers of Autonomous Underwater Vehicles, AUV technology, underwater gliders and autonomous submarines for survey, research and military applications
If you design, build or supply Autonomous Underwater Vehicles (AUV), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
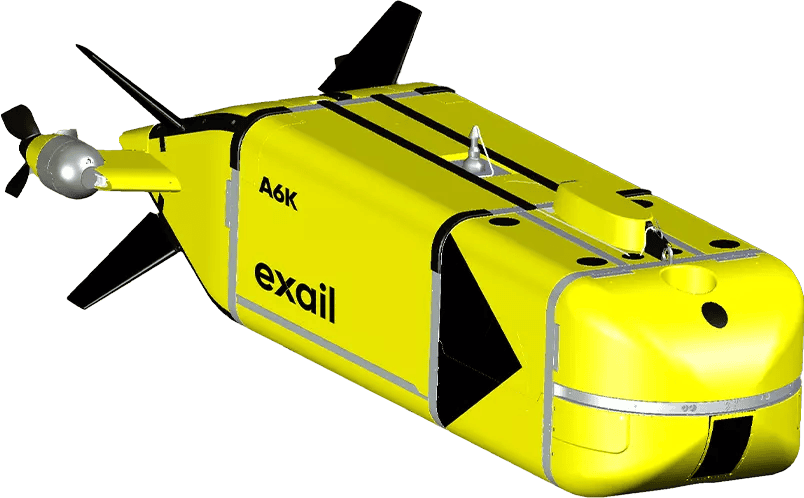
Ultra-deep autonomous underwater vehicle for survey and inspection
Ultra-deep autonomous underwater vehicle for survey and inspection
... an ultra-deep autonomousunderwatervehicle designed for survey and inspection missions at depths... ...equipment. The vehicle integrates multiple navigation and communication systems to ensure accurate...
...et Hydrus, the autonomousunderwater drone revolutionising underwater data collection by eliminating... ...L and INS, the underwater robotic vehicle is capable of carrying out missions in challenging subsea...
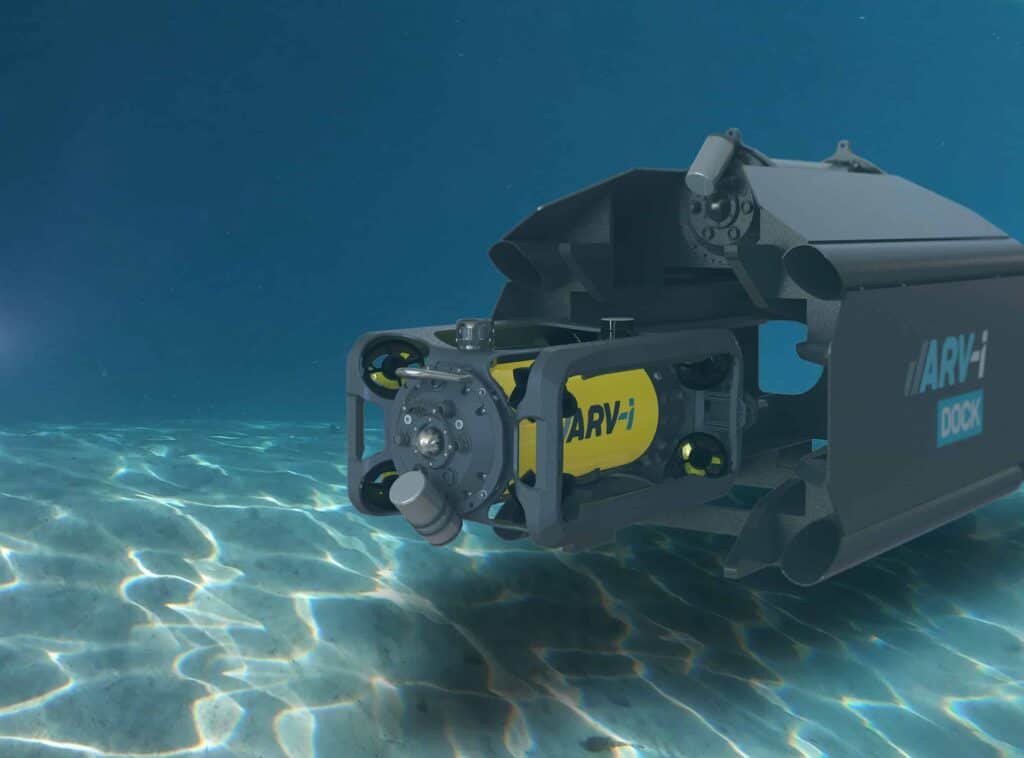
Modular autonomous underwater vehicle for advanced subsea operations
Modular autonomous underwater vehicle for advanced subsea operations
...ration modular underwater platform engineered to accommodate a wide range of payloads and mission... ......, cost-efficient subsea operations, offering a versatile platform for a range of underwater...
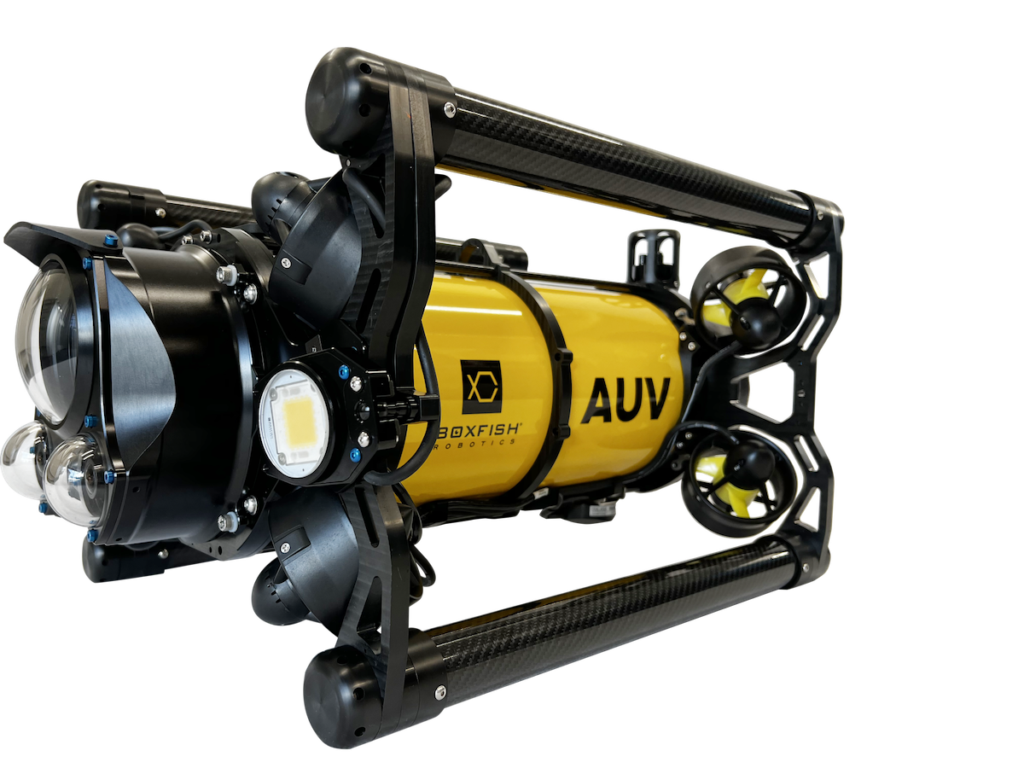
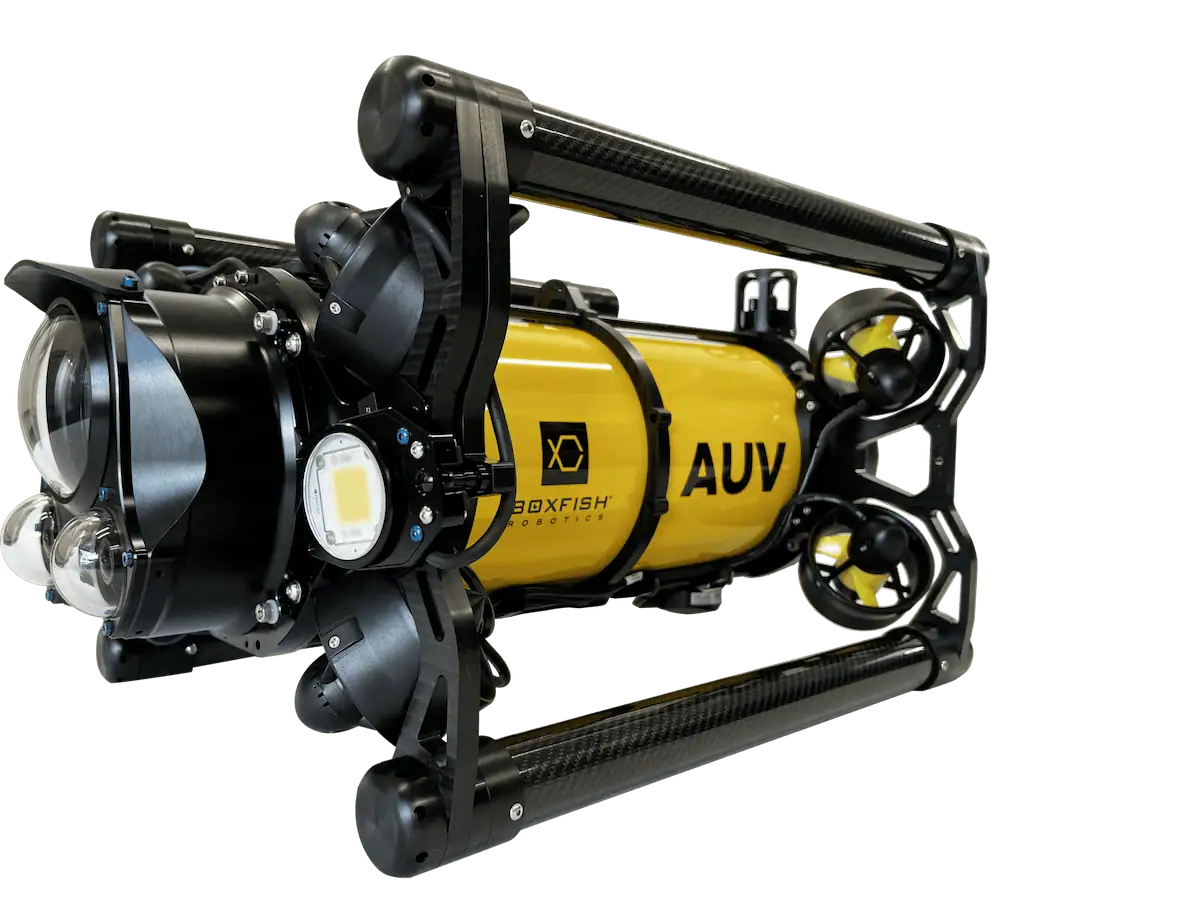
Tetherless hovering autonomous underwater vehicle for scientific & inspection missions
Tetherless hovering autonomous underwater vehicle for scientific & inspection missions
...rless hovering autonomousunderwatervehicle engineered for precise subsea operations and data... ...ilization, the vehicle delivers enhanced maneuverability in constrained underwater environments....
Boxfish AUV – Tetherless hovering AUV by Boxfish Robotics
Autonomous Underwater Vehicles (AUVs) are a subset of Unmanned Underwater Vehicles (UUVs) that can function without real-time control from a human operator. Sometimes referred to as untethered ROVs, they can be programmed to follow mission waypoints along a predetermined route and collect data or activate other payloads. Some autonomous submarines may use artificial intelligence (AI) capabilities to make decisions and react to changes in their environment.
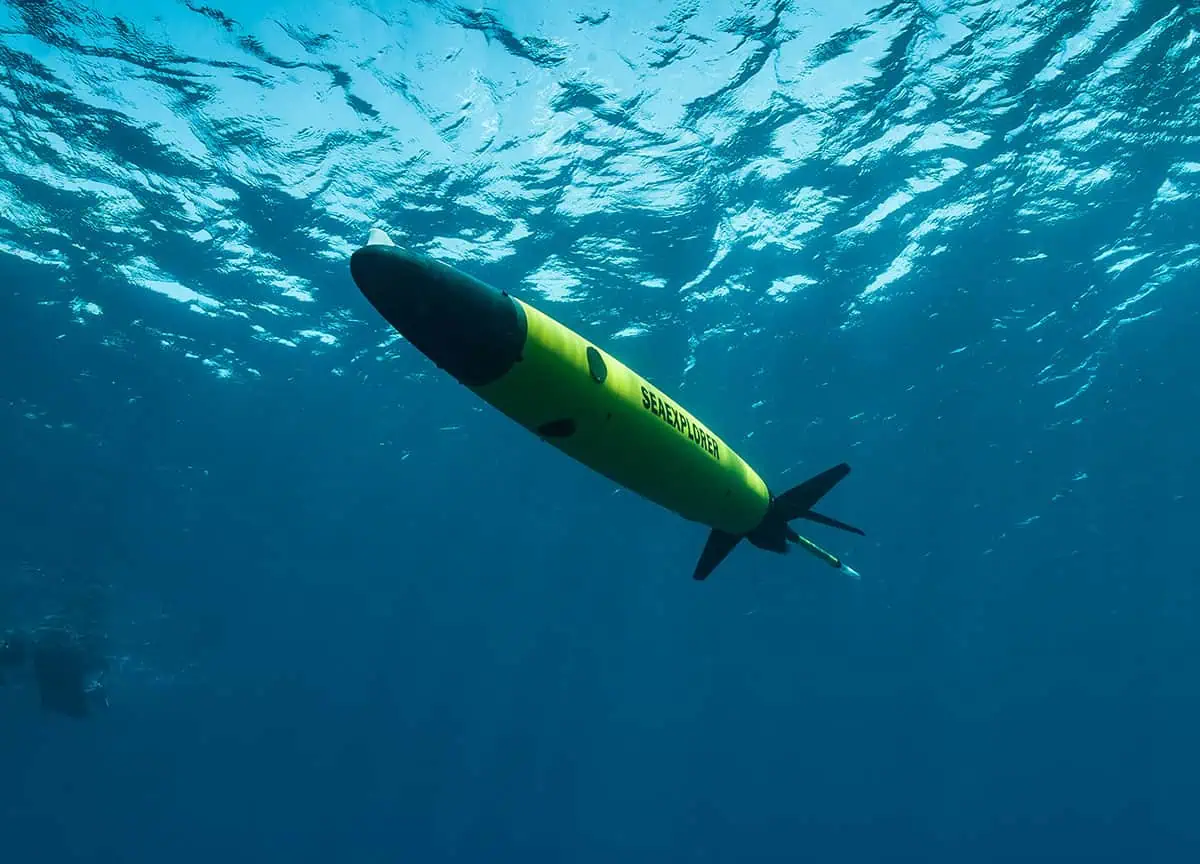
Underwater Gliders
Most AUVs are powered by rechargeable batteries, and some may also use fuel cells or solar power. The vehicles often use electric-powered propellers and thrusters for propulsion. A subset of AUVs, known as underwater gliders, use variable buoyancy to change their depth, and utilise hydrofoils to convert this movement into forward motion. Underwater gliders are ideal for sampling properties such as temperature and salinity throughout the water column.
Autonomous underwater navigation must rely on methods other than GPS, due to the inability of radios to penetrate very far into water. While the vehicle may surface from time to time in order to gain GPS fixes, this data must be supplemented by other technologies. Marine INS (Inertial Navigation Systems) can be used to gain position, acceleration, and velocity estimates, the accuracy of which can be improved with a Doppler Velocity Log, a device similar to sonar which measures the rate of travel over the sea floor. Depth can be measured using a pressure sensor.
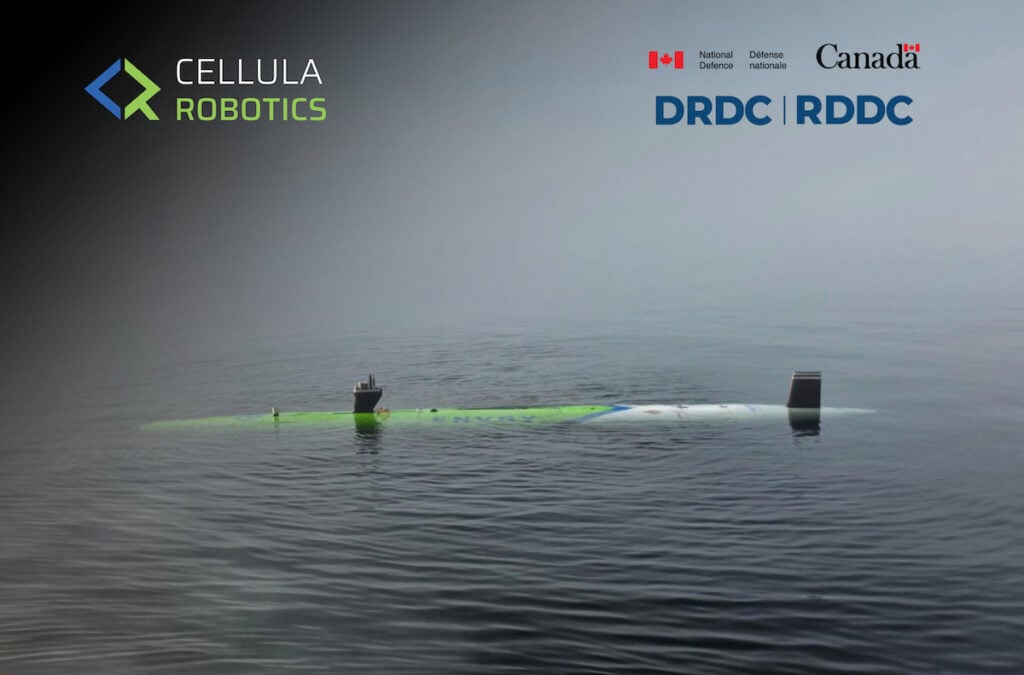
Envoy AUV by Cellula Robotics
AUV Sensors & Payloads
AUVs can carry a wide variety of underwater sensors and payloads that allow them to gather data and map the subsurface environment. These may include side scan sonars, single and multi-beam sonars, magnetometers, hydrophones and chemical sensors. Due to the inability to send or receive electromagnetic signals when submerged, data is stored onboard for later retrieval.
The US Navy has secured an $18.1 million agreement with Greensea IQ to deliver advanced hardware, software, and engineering services for underwater controllers operating autonomous subsea defense systems
Boxfish Robotics will demonstrate hovering AUV capabilities for geo-referenced transects, high-resolution data capture and repeatable reef and benthic surveys
Phantom 2 AUV's unique free-flooding payload architecture and advanced mission control algorithms propel Dynautics to top honors at the Seawork Innovations Showcase
A long-term development collaboration between Cellula Robotics and DRDC/RDDC has validated an AUV after the hydrogen fuel cell platform completed a 385-hour submerged mission covering 2,023 kilometers of highly complex underwater maneuvers
A long-term collaboration between Cellula Robotics and Metron leverages modular COTS platforms and adaptive autonomy to meet urgent US Navy requirements
Cellula Robotics & Infinity Fuel Cell achieve a landmark 2,023 km mission with the Envoy AUV to demonstrate the viability of long-range autonomous subsea operations
XPONENTIAL USA 2026 brings education and networking together, enabling professionals to exchange insights, test assumptions, and engage with peers to support more informed decision-making across uncrewed, autonomous, and robotics systems
Cellula Robotics will deliver a fuel cell-powered Guardian AUV for Defense Innovation Unit’s CAMP programme, partnering with Metron and industry leaders to advance long-endurance autonomous maritime capabilities for defence operations
Mar 27, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.