




Autonomous Inspection Vehicles
Discover cutting-edge solutions from 18 leading global suppliers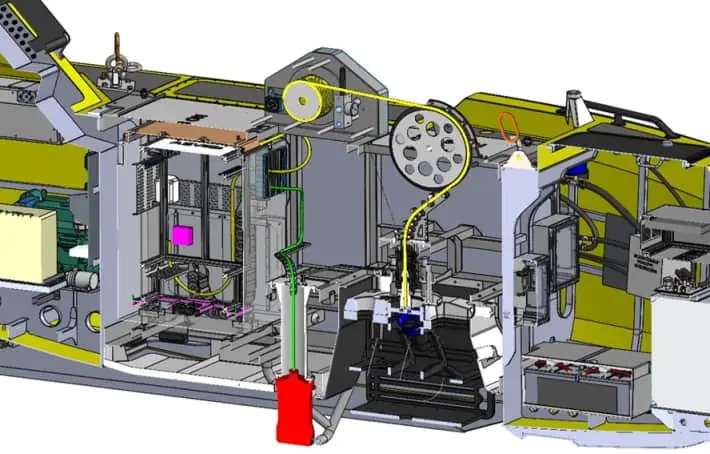
L3 ASV, a developer of unmanned and autonomous surface vessels (USVs / ASVs) has released a case study outlining the design and development of a new autonomous subsea inspection capability, based around a modified C-Worker 7 ASV that can deploy and recover an ROV (remotely operated vehicle).
Read the full case study on L3 ASV’s website
Many oil and gas platforms in and around the UK’s waters are reaching the end of their life, and the Autonomous Robotic Intervention System for Extreme Maritime Environments (ARISE) capability has been developed to help facilitate monitoring and maintenance of these platforms with minimal impact on day-to-day business.
The system tested in Phase 1 of the project included:
- A winch system with 50m of tether and powered sheath wheel for tension management
- Actuated lock latch system to retain ROV during transit
- Electronics enclosure hosting ROV and USBL topsides
- Pole mounted Sonardyne Mini Ranger 2 USBL system
- ROV housing
The case study describes how the system was tested and how it evolved to incorporate feedback from these tests. To find out more, read the full case study on L3 ASV’s website.







