VectorNav has confirmed that its VN-100 IMU/AHRS (Inertial Measurement Unit/Attitude and Heading Reference System) has been selected for integration into Ghost Robotics‘ Minitaur legged UGV (unmanned ground vehicle) platform. The VN-100 provides highly accurate, high speed attitude data for the robot, which uses an innovative direct-drive leg design and unique bipedal motion to provide superior mobility in a range of challenging environments and terrains, enabling the robot to run, jump and even climb.
The Minitaur is a medium-sized, fast, lightweight and dynamic direct-drive legged robot platform for developing commercial unmanned ground vehicles (UGVs), advanced gait and locomotion research, and machine learning and training applications. The Minitaur’s unique leg design and custom motor controllers provide distinct advantages over legacy UGV platforms.
Legged locomotion poses a challenge in both coordination and balance that requires very precise state estimation to coordinate multiple degrees of freedom. The Minitaur employs a bounding gait, in which the direct-drive motors and unique leg design behave in a “spring-like” behavior to enable the robot to traverse rough and difficult terrain. This bounding gait provided a significant challenge to source a inertial measurement solution that was capable of providing highly accurate attitude estimation over the full range of dynamics the Minitaur would operate over. To illustrate, the robot can run at speeds of up to 2 m/s (2.2 mph), achieve angular velocities of 10 rad/s (570°/s) and experience 10 g impacts when landing from a large jump.
The Ghost team initially started working with a commercially available uncalibrated Inertial Measurement Unit (IMU) but quickly came to realize that they required a higher level of accuracy in order to achieve the required behaviors. They moved on to an industrial grade IMU from another supplier which provided improved accuracy, however this lacked sufficient range to accommodate the large angular rates that the Minitaur experienced. While the Ghost Robotics team was based at the University of Pennsylvania GRASP (General Robotics, Automation, Sensing & Perception) Laboratory, they worked alongside other researchers using the VN-100 IMU/AHRS for SLAM (simultaneous localization and mapping) applications on small autonomous aerial vehicles. “The VN-100 has an excellent reputation, and satisfied all our testing criteria,” said Gavin Kenneally, co-founder of Ghost Robotics.
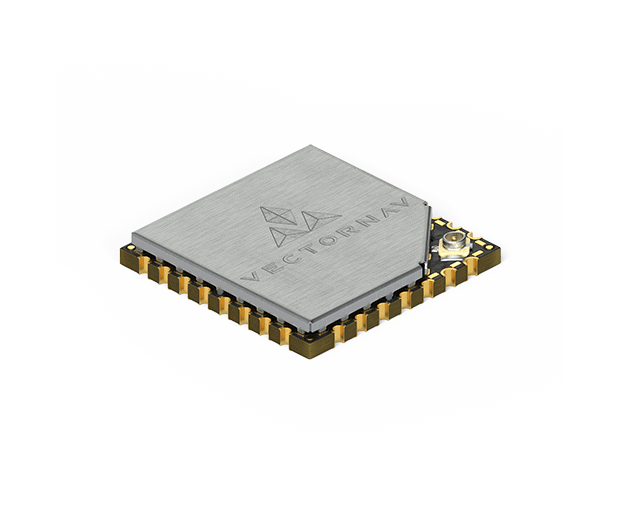
The team decided to integrate the VN-100 Surface Mount Device into the Minitaur PCB, “The SMD option allows us to tightly integrate the VN-100 into our custom electronics without necessitating additional housing etc.,” continued Kenneally. “The SMD version also offers interface via SPI, which is great because the SPI clock speed can be significantly higher than the UART baud rate,” added Avik De, co-founder of Ghost Robotics.
The small form factor, low weight, low-power and high performance of the VN-100 enabled Ghost Robotics to maximize the performance of the Minitaur battery life, with the robot able to stand for 6.75 hours and run at full speed for 20 minutes. One of the additional advantages of the VectorNav Industrial Series SMDs is that they share a common footprint, pin-out and protocol which has enabled Ghost Robotics to provide not only a high accuracy orientation sensor but also a fully functional Inertial Navigation System (INS) in the future by using the VN-200. Versions of the Minitaur with the integrated VN-200 will enable users to build additional functionality such as waypoint navigation, return-to-home and geolocation.
“We are very satisfied with the VN-100 and all of the support VectorNav has provided. The bipedal walking behavior that the Minitaur is able to perform is only possible with this high performance VN-100 IMU,” said De. Ghost Robotics is receiving great interest from the market, for use in research, commercial and military applications and is in the process of building their first commercially viable legged robot. Ghost plans to build a full portfolio of small to medium scale ruggedized field-grade UGV platforms in the coming years.