Se você projeta, constrói ou fornece Navegação e posicionamento subaquáticos, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
The Comprehensive Guide to Underwater Navigation & Subsea Positioning for ROV, UUV & AUV Systems
Visão geral por
Sarah Simpson
Atualizado:
Posicionamento submarino para UUV, AUV e ROV
A navegação, o posicionamento e o rastreamento subaquáticos para UUVs (veículos subaquáticos não tripulados), AUVs (veículos subaquáticos autónomos) e ROVs (veículos operados remotamente) são geralmente realizados usando métodos acústicos ou baseados em movimento, pois as ondas de RF e outras ondas eletromagnéticas não viajam por distâncias úteis debaixo d’água. Isto significa que, ao contrário dos veículos não tripulados noutros domínios, os veículos robóticos subaquáticos não podem contar com sinais GNSS continuamente atualizados para obter uma posição fixa.
Os sistemas de navegação e posicionamento acústicos utilizam nós de superfície fixos com uma posição GNSS conhecida e uma série de transponders subaquáticos que podem ser acionados acusticamente para fornecer informações sobre a sua distância e ângulo em relação ao nó de superfície.
Ramses – Transceptor de posicionamento LBL de alta precisão da iXblue
As duas formas mais comuns de sistemas de posicionamento acústico são Long Baseline (LBL) e Ultra-Short Baseline (USBL).
Long Baseline – Posicionamento LBL
Os sistemas LBL utilizam uma rede de transponders fixos no fundo do mar em torno da área de operação do veículo. Estes transponders devem ser calibrados com referência a um nó de superfície para fixar a sua posição, e a triangulação pode então ser utilizada para localizar o veículo dentro da rede de transponders.
Linha de base ultracurta – Posicionamento USBL
Sistema de posicionamento acústico subaquático Subsonus USBL da Advanced Navigation
Os sistemas USBL utilizam um conjunto de transdutores que normalmente é montado sob uma embarcação de superfície. O tempo de retorno e a mudança de fase do sinal acústico são usados para determinar a distância e a direção do transdutor, que por sua vez são usados para fixar a posição do veículo em relação à embarcação de superfície.
Os sistemas USBL não são tão precisos quanto os sistemas LBL, mas são mais flexíveis e fáceis de implementar, pois não requerem a instalação de uma rede calibrada de nós submarinos.
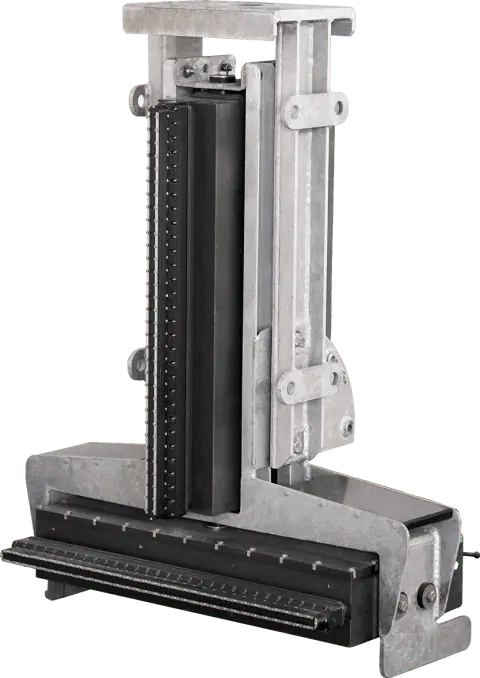
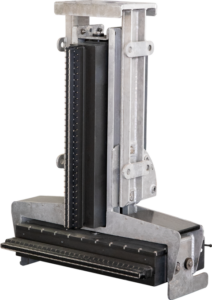
Registos de velocidade Doppler – Posicionamento DVL
Registrador de velocidade Doppler subaquático Syrinx da Sonardyne
Em vez de transponders ou transdutores externos, os UUVs também podem usar registos de velocidade Doppler (DVLs), que são sensores que utilizam múltiplos feixes acústicos para estimar a velocidade em relação ao fundo do mar. Estas leituras de velocidade podem ser integradas para fornecer uma estimativa contínua da mudança de posição. Os DVLs são úteis como uma fonte precisa de estimativa de velocidade para INS (sistemas de navegação inercial), e um INS auxiliado por DVL pode ser usado como um auxílio de navegação e posicionamento de alta precisão para robótica subaquática.
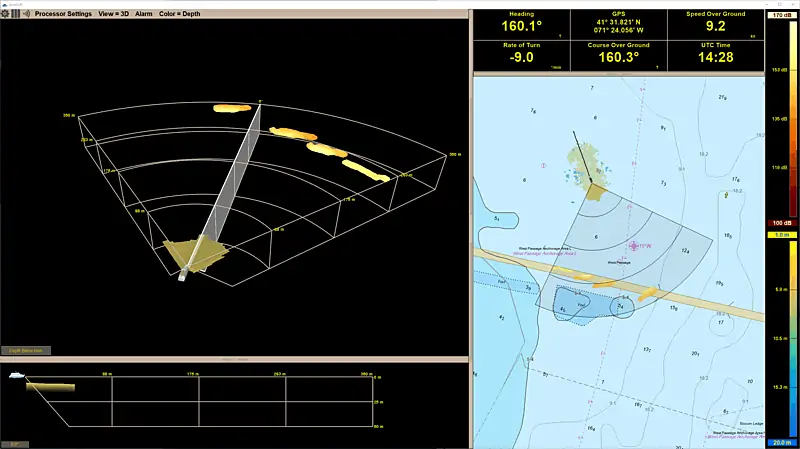
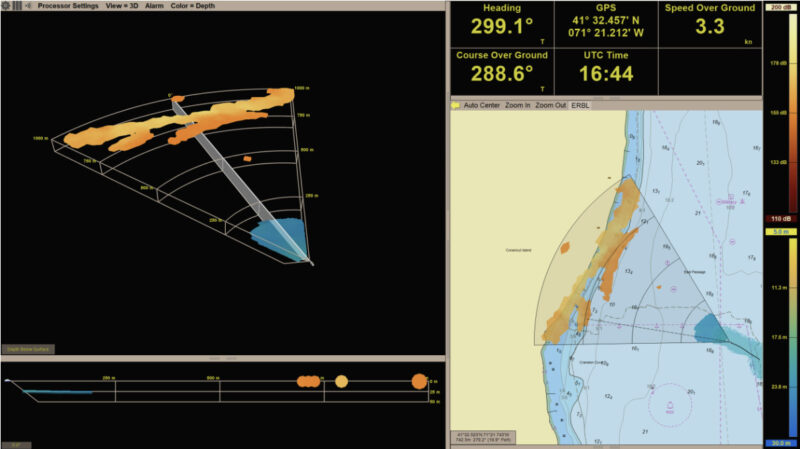
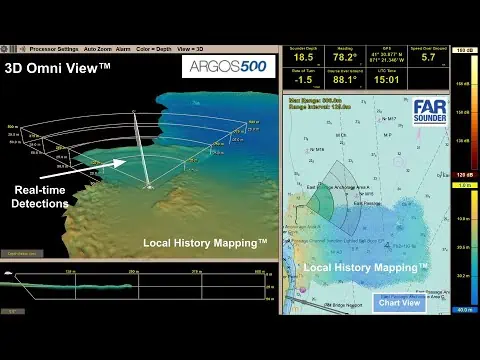
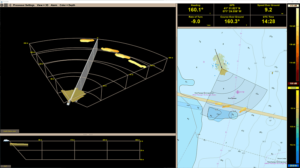
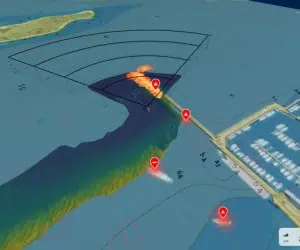
A nova subvenção da FarSounder concedida pela Rhode Island Commerce Corporation irá acelerar o desenvolvimento das suas estruturas de aprendizagem automática para a classificação automática de perigos marítimos