Siłowniki do dronów i systemy uruchamiania dla bezzałogowych statków powietrznych
Znajdź producentów siłowników do dronów i dostawców systemów uruchamiania dla bezzałogowych statków powietrznych (UAV), bezzałogowych systemów powietrznych (UAS), bezzałogowych pojazdów naziemnych (UGV), bezzałogowych statków wodnych (USV), bezzałogowych pojazdów podwodnych (UUV) i robotyki, w tym siłowników sterujących, liniowych i obrotowych.
Rozwiązania sprzętowe dla bezzałogowych statków powietrznych: systemy napędowe i paliwowe, serwomechanizmy i kontrolery lotu, rozwiązania obrazujące, wyrzutnie i spadochrony
Jeśli projektujesz, budujesz lub dostarczasz Siłowniki i systemy uruchamiania, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Siłowniki do dronów i systemy uruchamiania dla bezzałogowych statków powietrznych
Przegląd według
Caroline Rees
Aktualizacja:
Czym są siłowniki?
Siłowniki to elementy, które przekształcają energię w ruch mechaniczny w celu poruszania lub sterowania mechanizmem lub systemem. Wykorzystują one źródło energii, takie jak prąd elektryczny, ciśnienie hydrauliczne lub ciśnienie pneumatyczne, i są aktywowane sygnałem sterującym, takim jak napięcie, prąd, ciśnienie lub siła ludzkich mięśni. Siłowniki można znaleźć w wielu podsystemach bezzałogowych statków powietrznych (UAV) i innych pojazdów robotycznych.
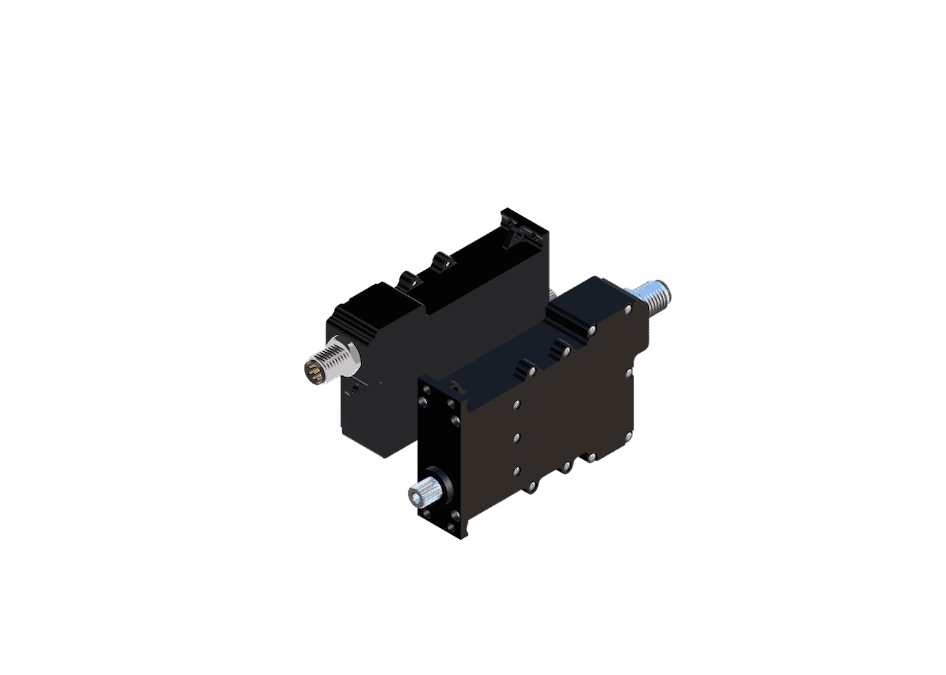
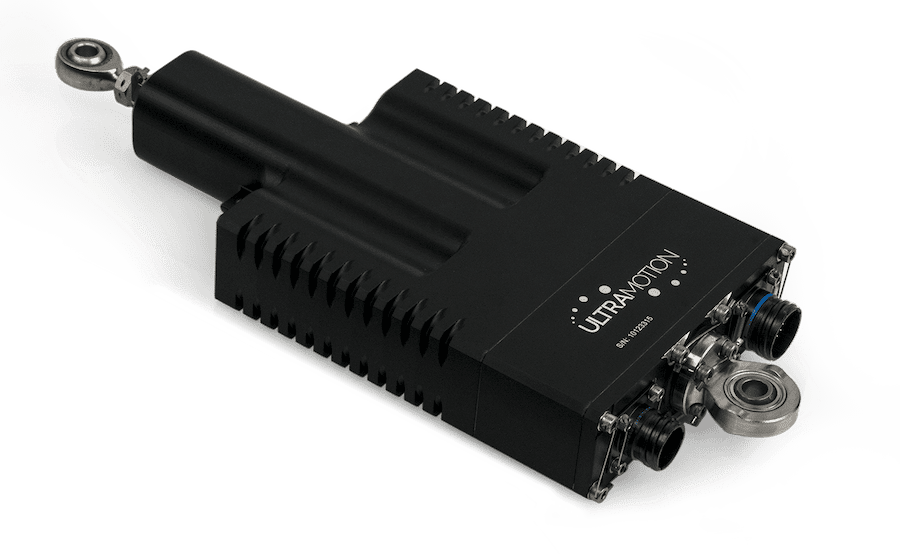
Siłowniki liniowe
Siłowniki liniowe serii L firmy Ultra Motion
Siłowniki mogą być liniowe, przekształcające energię w ruch prostoliniowy, lub obrotowe, wykorzystujące serwomechanizm lub silnik bezszczotkowy do wytwarzania ruchu obrotowego i zapewniania momentu obrotowego.
Siłowniki obrotowe
Siłowniki obrotowe zapewniają ograniczony skok kątowy lub umożliwiają ciągły obrót, co jest przydatne w elektrooptycznych systemach celowniczych oraz innych systemach pozycjonowania i skanowania stosowanych w bezzałogowych statkach powietrznych.
Systemy uruchamiania sterowania lotem
Siłowniki są również powszechnie stosowane do poruszania powierzchniami sterującymi lotem i położeniem w bezzałogowych statkach powietrznych, takimi jak ster wysokości, lotki, klapy i przednie koło. Inne zastosowania w bezzałogowych statkach powietrznych obejmują otwieranie i zamykanie przepustnicy w silnikach spalinowych, a także drzwi i włazy.
Siłowniki mogą być połączone z elektromagnetycznym sprzęgłem, które można ręcznie włączać lub wyłączać. Taki system można znaleźć w pojazdach z opcjonalnym pilotowaniem (OPV), umożliwiając pilotowi przełączanie między trybem lotu bezzałogowego i załogowego.
Siłowniki podwodne do pojazdów AUV i ROV
W zastosowaniach głębinowych i podwodnych wodoodporne siłowniki mogą być umieszczone w obudowach z brązu morskiego lub aluminium odpornego na słoną wodę. Siłowniki te są zaprojektowane do pracy w ekstremalnych warunkach ciśnienia i zanurzenia i można je znaleźć w zdalnie sterowanych pojazdach (ROV), autonomicznych pojazdach podwodnych (AUV) i innych robotach podwodnych.
Redundancja uruchamiania
Systemy uruchamiania mogą zapewniać redundancję poprzez zastosowanie wielu silników, sterowników, źródeł zasilania i innych komponentów, tworząc w ten sposób architekturę systemu odporną na pojedyncze punkty awarii. Systemy te są ważne w zastosowaniach krytycznych dla bezpieczeństwa, takich jak bezzałogowe helikoptery.
Rodzaje siłowników
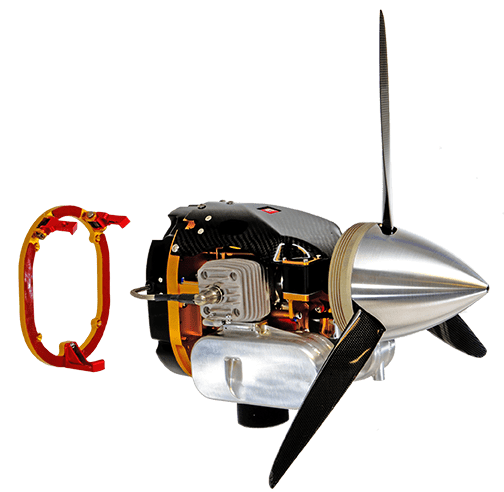
Siłowniki elektryczne
Bezszczotkowy siłownik DA 30-HT-MCCS firmy Volz Servos
Siłowniki elektryczne to urządzenia napędzane silnikiem, które przekształcają prąd elektryczny w ruch mechaniczny, liniowy lub obrotowy. Ruch liniowy jest zapewniany przez zespół śrubowy, który może być napędzany bezpośrednio, za pomocą paska lub przekładni, natomiast siłowniki obrotowe wykorzystują ruch wyjściowy silnika do zapewnienia momentu obrotowego.
Siłowniki elektryczne są kompaktowe, stosunkowo ciche i łatwiejsze do podłączenia do systemów elektrycznych niż siłowniki pneumatyczne lub hydrauliczne. Zapewniają bardzo precyzyjne pozycjonowanie i wysoką powtarzalność. Enkodery mogą być wykorzystywane do zapewnienia pełnej kontroli nad położeniem, prędkością, momentem obrotowym i przyłożoną siłą.
W zależności od konstrukcji, początkowe koszty siłowników elektrycznych mogą być wyższe niż w przypadku siłowników pneumatycznych i hydraulicznych. Mogą one również nie nadawać się do niektórych środowisk, takich jak obszary łatwopalne lub wrażliwe na oddziaływanie elektromagnetyczne.
Różne typy silników stosowanych w siłownikach elektrycznych obejmują: DC, DC serwo, DC bezszczotkowy, DC bezszczotkowy serwo, AC, AC serwo i krokowy.
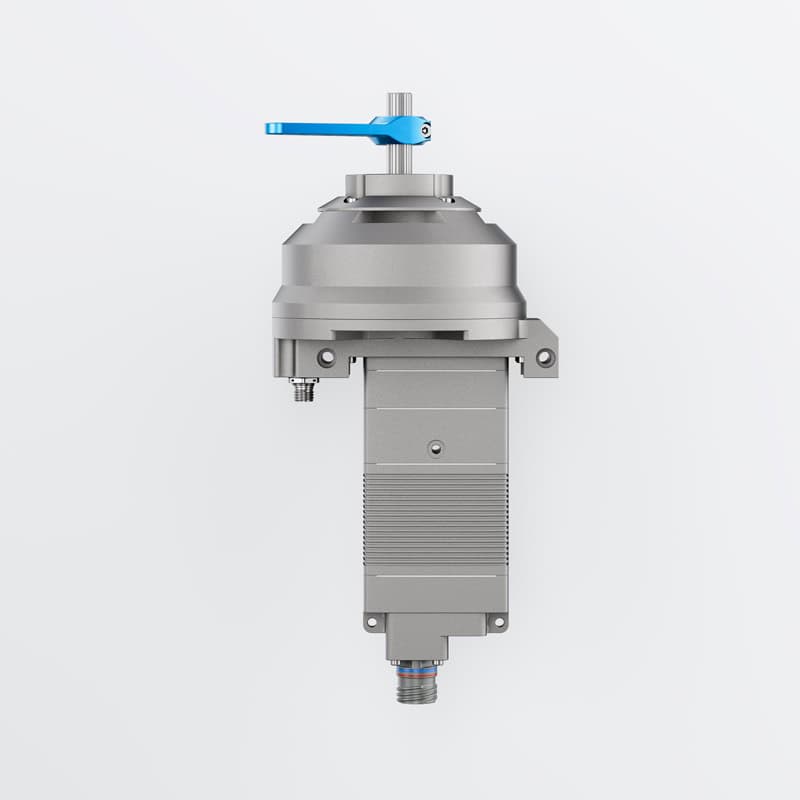
Siłowniki serwo
Wytrzymały serwomechanizm ServoMax 20 firmy Contromax
Serwomechanizmy to siłowniki elektryczne, które wykorzystują dodatkowe obwody i mechanizm sprzężenia zwrotnego w pętli zamkniętej, aby zapewnić dodatkową precyzję i kontrolę. Sygnał sprzężenia zwrotnego jest zazwyczaj generowany przez potencjometr lub enkoder obrotowy i powstaje w wyniku porównania sygnału wyjściowego serwomechanizmu z referencyjnym sygnałem wejściowym.
Serwomechanizmy umożliwiają precyzyjną kontrolę położenia i prędkości nawet podczas ruchu silnika. Kierunek ruchu można zmienić bez konieczności odwracania polaryzacji zasilania.
Siłowniki pneumatyczne
Siłowniki pneumatyczne wykorzystują sprężone powietrze lub inne gazy z zewnętrznej sprężarki lub pompy ręcznej do poruszania tłokiem w cylindrze. Mogą być one jednostronnego działania, w którym tłok powraca do swojego pierwotnego położenia za pomocą sprężyny, lub dwustronnego działania, w którym sprężone powietrze może być doprowadzane do obu stron tłoka.
Siłowniki pneumatyczne mają stosunkowo prostą konstrukcję i wymagają niewielkiej konserwacji. Jednak ze względu na straty ciśnienia i ściśliwość powietrza są one mniej wydajne niż inne metody generowania ruchu liniowego. Wymagają one również ciągłej pracy sprężarki i generowania ciśnienia, nawet gdy nie jest wymagany żaden ruch.
Siłowniki hydrauliczne
Siłowniki hydrauliczne działają podobnie do siłowników pneumatycznych, ale zamiast gazu wykorzystują ciecz do poruszania tłokiem. Ze względu na nieściśliwość cieczy siłowniki hydrauliczne mogą zapewnić większą siłę wyjściową niż siłowniki pneumatyczne tej samej wielkości.
Siłowniki hydrauliczne mogą tracić wydajność z powodu wycieków płynu. Wymagają również wielu części pomocniczych, co sprawia, że są nieporęczne i bardziej skomplikowane w konserwacji.
Dostosowane siłowniki DA 15-N firmy Volz Servos wspierają elektryczny samolot pionowego startu i lądowania Twister firmy Quantum Systems, zapewniając precyzyjną kontrolę powierzchni lotu dla niezawodnych autonomicznych operacji w ograniczonym środowisku
Contromax weźmie udział w targach Drone Show Korea, które odbędą się w dniach 25-27 lutego w Busan w Republice Korei, gdzie firma będzie wystawiać się na stoisku I09