




Inertial Navigation Systems (INS)
Discover cutting-edge solutions from 9 leading global suppliers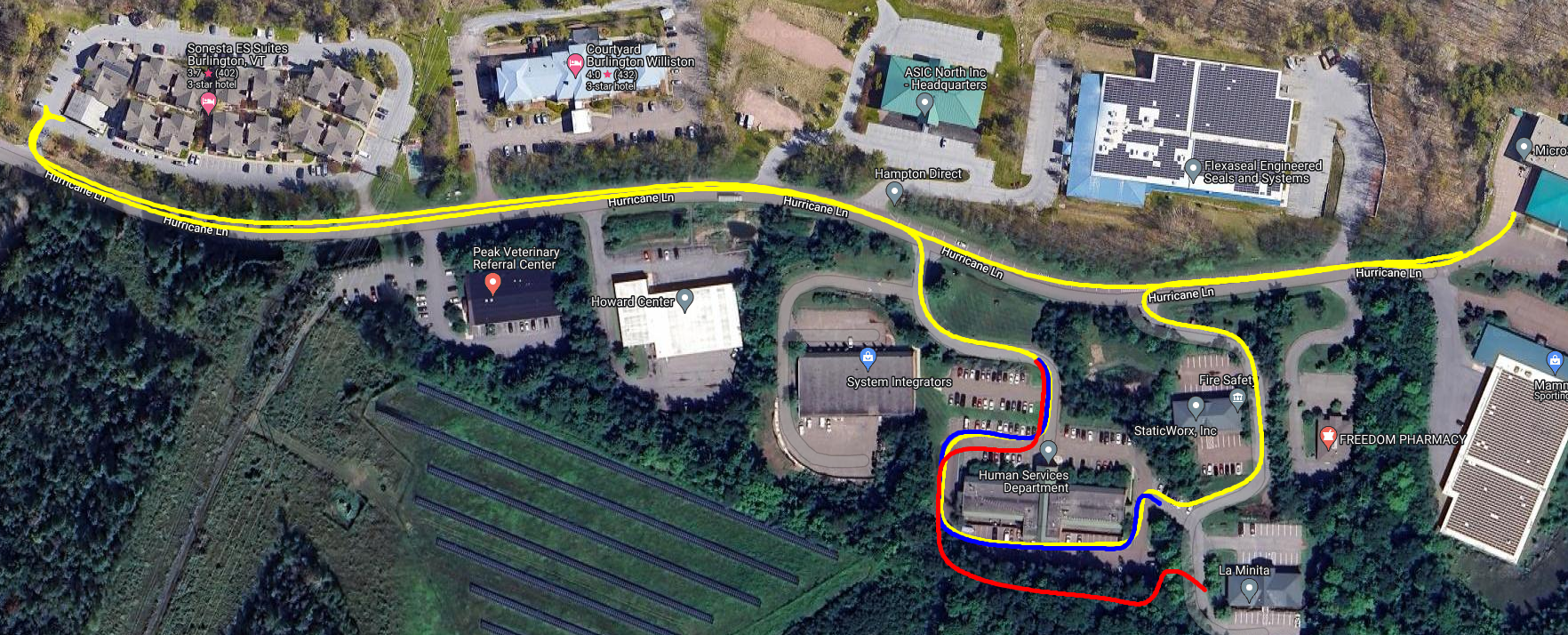
MicroStrain by HBK understands that as autonomous systems venture into increasingly challenging environments, the need for more robust navigation solutions becomes a priority. Read more >>
Unmanned vehicles and robots often encounter environments where traditional Global Navigation Satellite Systems (GNSS) lose effectiveness, such as urban canyons, tunnels, or indoor spaces.
MicroStrain by HBK is addressing these challenges with its innovative 3DM-CV7-INS, an inertial navigation system designed to integrate radar technology for enhanced performance during GNSS outages.
Addressing GNSS Limitations in Autonomous Systems
For autonomous robots and unmanned vehicles, navigating complex environments demands more than just a basic GNSS/INS setup. Urban landscapes, tunnels, or adverse weather conditions can interrupt satellite signals, leading to degraded performance or even mission failure. To overcome these limitations, modern navigation systems require additional sensors and robust technology that can seamlessly operate even when GNSS is unavailable.
MicroStrain’s 3DM-CV7-INS steps intothis space by providing a flexible external aiding interface that can incorporate a range of navigation measurements, from GNSS position and velocity to robotic-specific data such as body-frame velocity and wheel speed. This system is particularly relevant as industries push for autonomous solutions capable of high-precision performance in GNSS-denied environments.
Leveraging Radar Technology for Enhanced Navigation
Traditionally, robots have relied on optical sensors like cameras and LiDAR to support their navigation and perception systems. However, these technologies can struggle in conditions such as smoke, fog, or heavy rain. In contrast, radar—thanks to advancements in millimeter-wave (mmWave) technology—offers a robust alternative, with the ability to function in a wider range of environmental conditions.
MicroStrain’s 3DM-CV7-INS combines this radar-based approach with its core INS platform, providing a system that significantly improves navigation accuracy during GNSS outages. This capability represents a critical advancement for autonomous systems, enabling them to maintain reliable navigation in environments where traditional GNSS/INS systems might fail.

Integrated System Architecture
At the core of this system is the CV7-INS, a tactical-grade inertial navigation solution that integrates data from external aiding sensors. In a typical setup, it pairs with a UBlox ZED-F9P GNSS receiver and a Smartmicro DRVEGRD 152 automotive radar sensor. The GNSS receiver provides global position and velocity data, while the radar sensor delivers raw 4D point clouds, which are processed to extract body-frame velocity measurements.
This configuration allows the CV7-INS to seamlessly fuse data from multiple sources via an onboard Extended Kalman Filter (EKF). The result is a navigation system that remains highly accurate, even when GNSS signals are degraded or unavailable. The system’s versatility allows it to be adapted for a range of autonomous platforms, whether used in robotics, automotive applications, or unmanned aerial vehicles (UAVs).
Radar Preprocessing for Accurate Navigation
Before the radar data can be integrated into the CV7-INS, it undergoes a preprocessing phase. Radar point clouds—captured in terms of position and speed—are transformed into compact navigation aiding measurements using a nonlinear least-squares solver. This process ensures that the resulting body-frame velocity data is accurate and that outliers and obstacles are effectively filtered out.

Though radar excels in providing forward (X-axis) velocity data, the system is designed to maintain reasonable accuracy across all axes, helping to maintain a stable and reliable navigation solution in the absence of GNSS signals.
Simulated GNSS Outages: Demonstrating Performance Gains
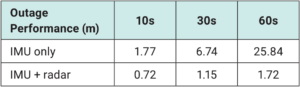
To quantify the benefits of radar integration, MicroStrain conducted tests simulating GNSS outages. These outages, lasting 60 seconds, were introduced in post-processing, allowing the EKF algorithm to reprocess data and evaluate navigation performance.
-
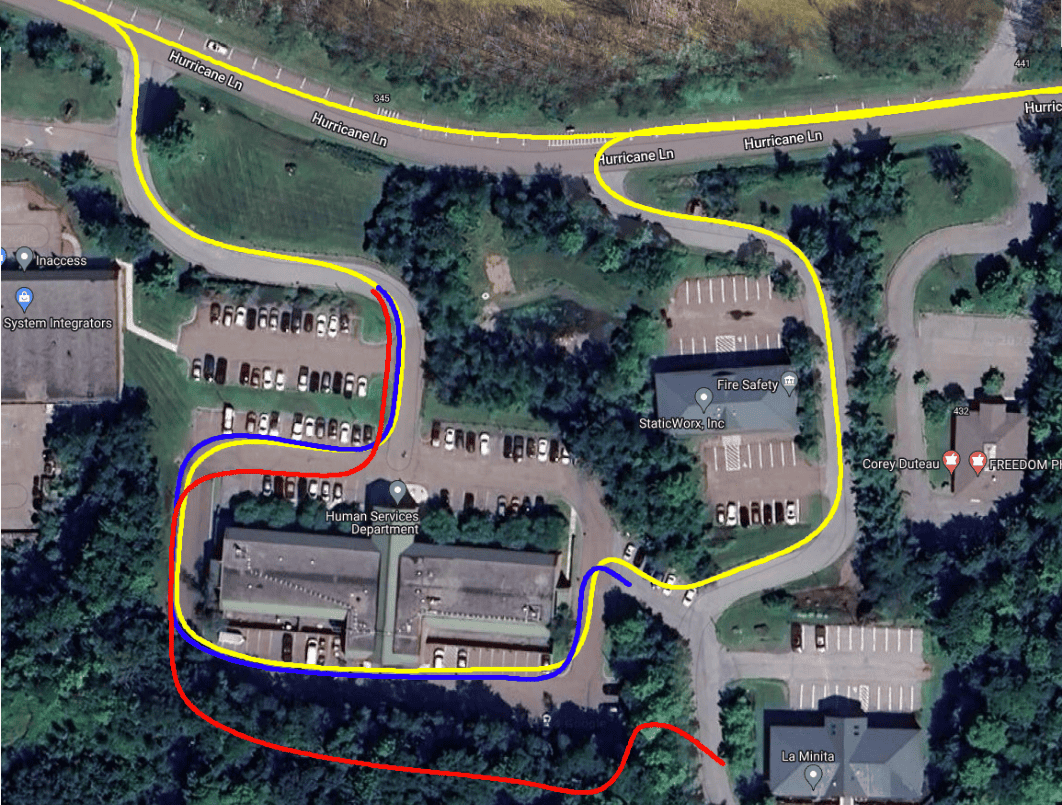
- Figure 1: Example GNSS outage. Yellow: ground truth, Blue: radar-aided solution during outage, Red: free inertial integrated solution during outage.
-
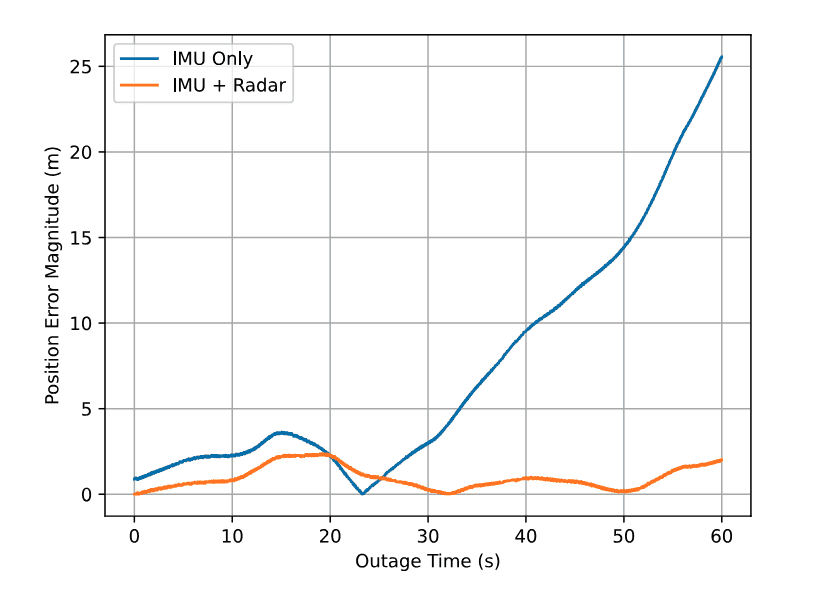
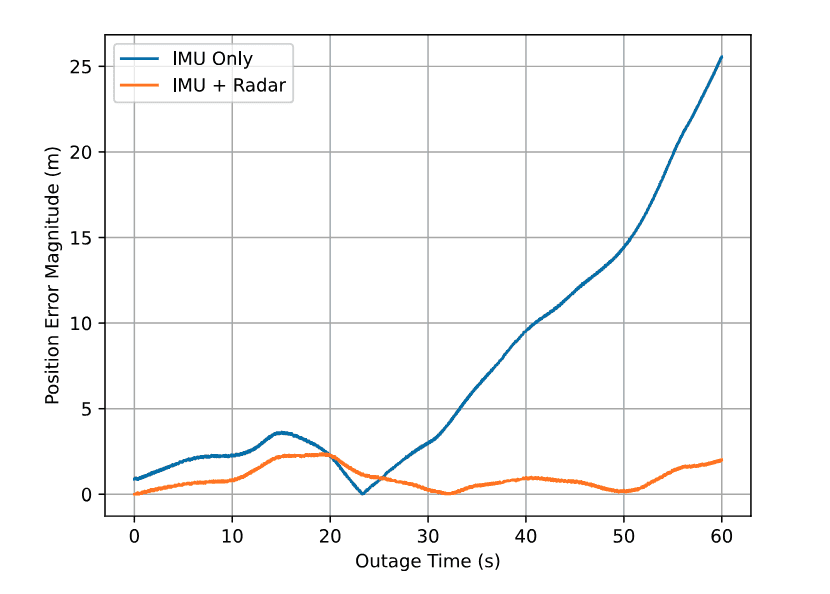
- Figure 2: Absolute error during the 60 second outage.
-
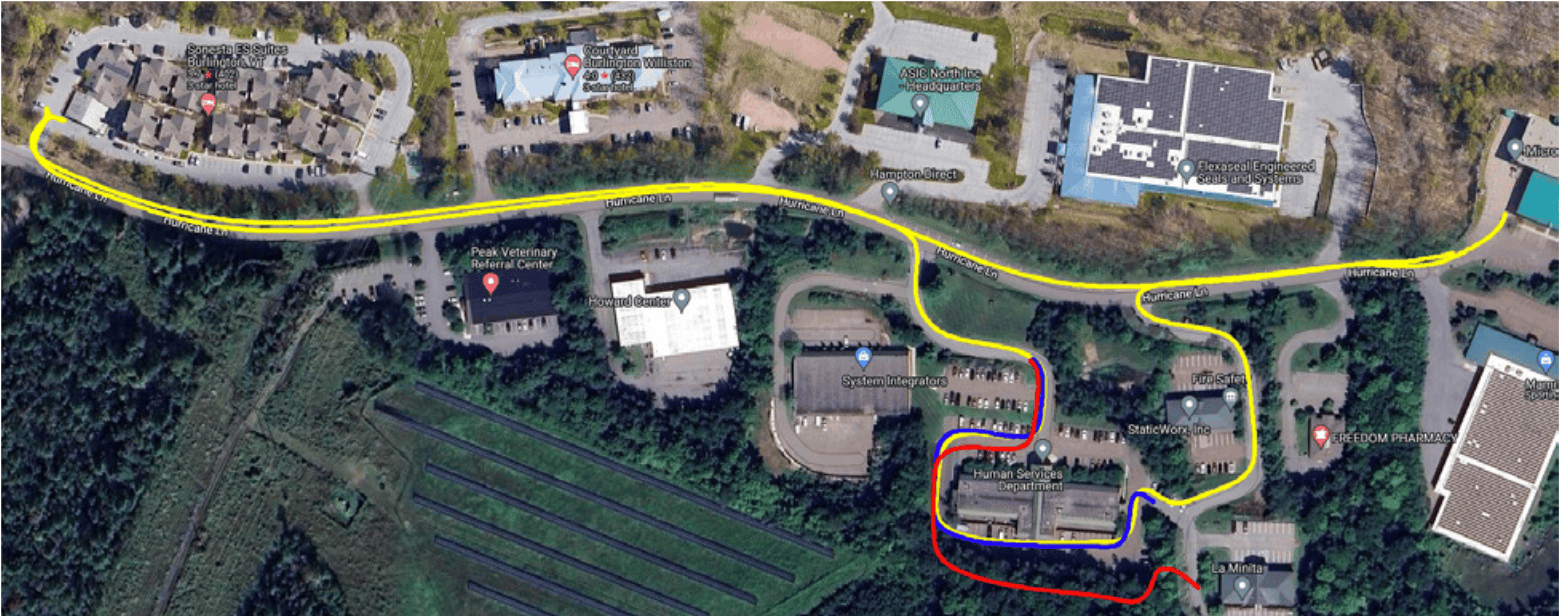
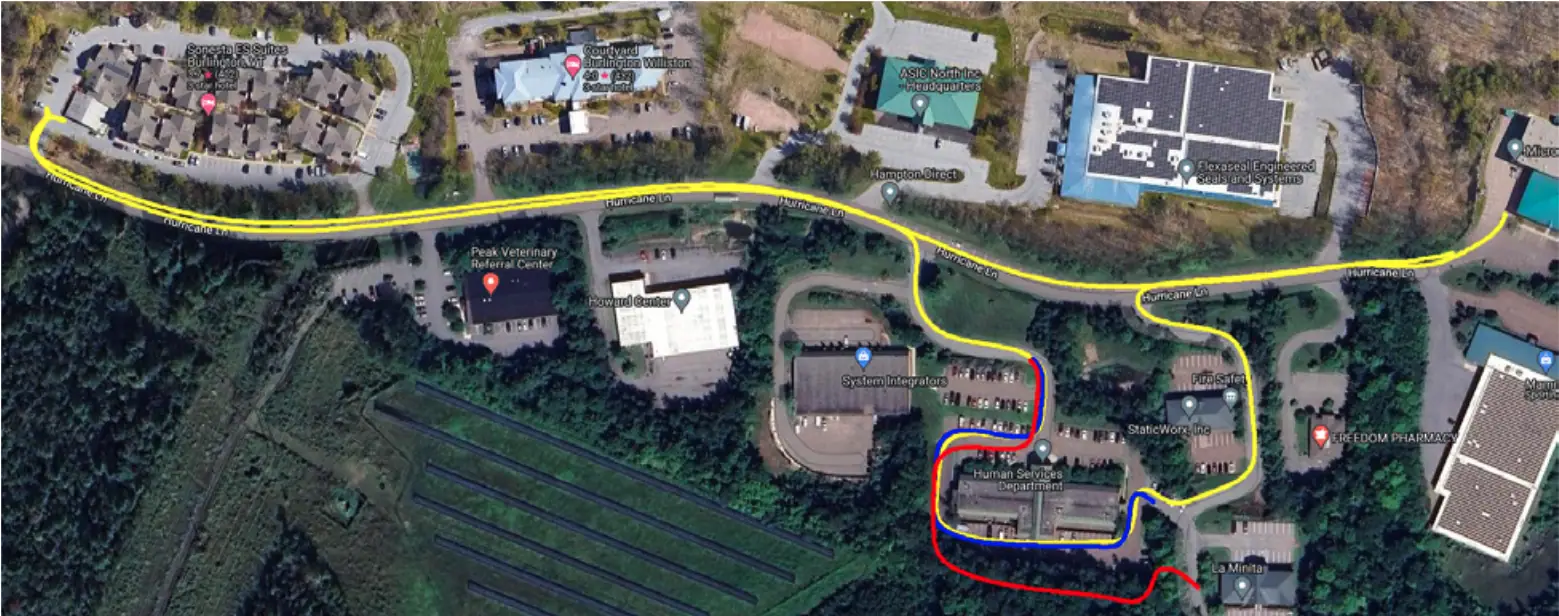
- Figure 3: Area of detail for GNSS outage

-
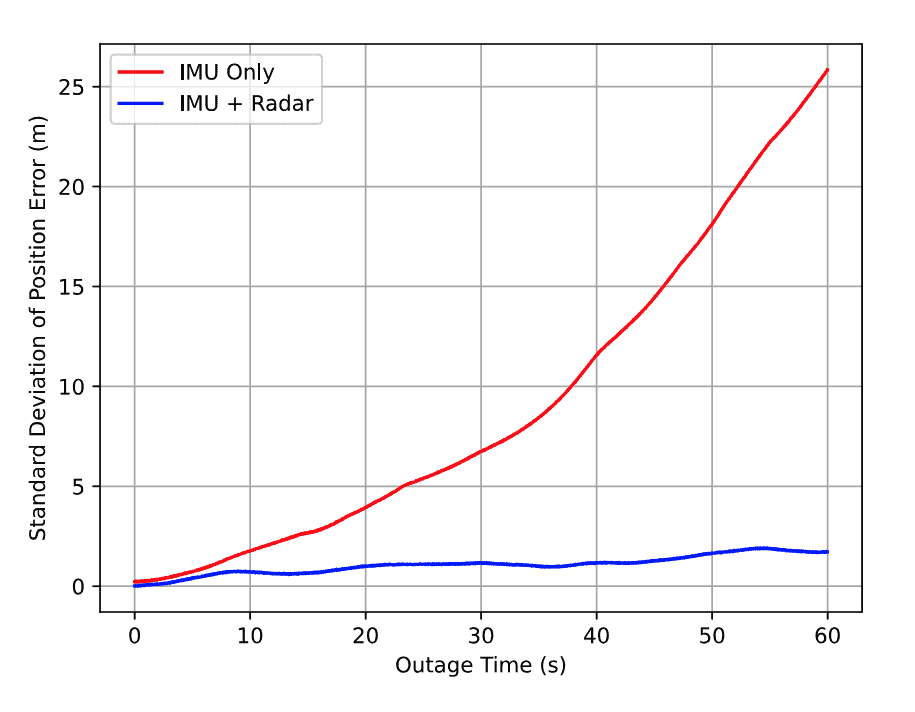
- Figure 4: Standard deviation plot.
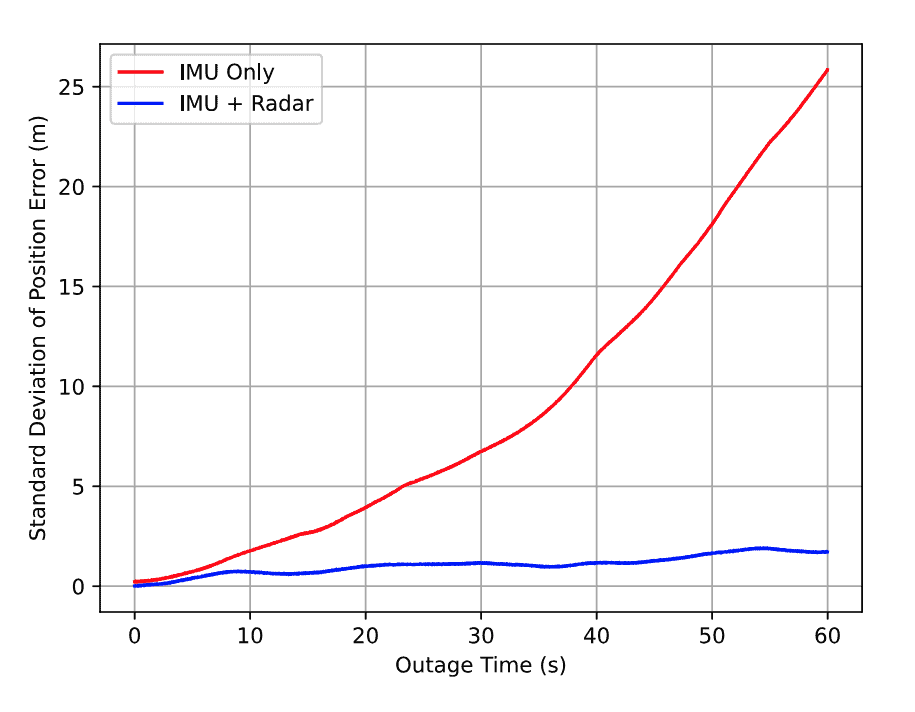
The results demonstrated a significant improvement, with radar-aided navigation outperforming traditional inertial-only setups by as much as 93% in terms of reduced position error.
This breakthrough highlights the potential for radar-aided INS solutions in applications where GNSS outages are common, such as subterranean exploration, urban navigation, or industrial automation.
Pushing the Boundaries of Autonomous Navigation
As industries continue to demand more capable and reliable autonomous systems, the importance of robust navigation technology cannot be overstated. MicroStrain’s 3DM-CV7-INS, when integrated with radar velocity measurements, offers a compelling solution for improving navigation performance in GNSS-denied environments.
By leveraging radar technology, MicroStrain has created a system that not only enhances the capabilities of autonomous systems but also sets a new standard for performance in challenging environments. As the need for resilient and adaptable navigation increases, the 3DM-CV7-INS is poised to play a key role in the future of autonomous technology.
Read the original whitepaper, or find out more on the MicroStrain by HBK website.












