Wenn Sie entwerfen, bauen oder liefern Unterwassernavigation und -ortung, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Die Unterwassernavigation, -ortung und -verfolgung für UUVs (unbemannte Unterwasserfahrzeuge), AUVs (autonome Unterwasserfahrzeuge) und ROVs (ferngesteuerte Unterwasserfahrzeuge) erfolgt in der Regel mithilfe akustischer oder bewegungsbasierter Methoden, da RF- und andere elektromagnetische Wellen unter Wasser keine nützlichen Entfernungen zurücklegen können. Das bedeutet, dass Unterwasserroboterfahrzeuge im Gegensatz zu unbemannten Fahrzeugen in anderen Bereichen nicht auf kontinuierlich aktualisierte GNSS-Signale zurückgreifen können, um ihre Position zu bestimmen.
Akustische Navigations- und Positionierungssysteme verwenden feste Oberflächenknoten mit einer bekannten GNSS-Position und eine Reihe von Unterwasser-Transpondern, die akustisch angepingt werden können, um Informationen über ihre Entfernung und ihren Winkel relativ zum Oberflächenknoten zu liefern.
Ramses – Hochpräziser LBL-Positionierungstransceiver von iXblue
Die beiden gängigsten Formen akustischer Positionierungssysteme sind Long Baseline (LBL) und Ultra-Short Baseline (USBL).
Long Baseline – LBL-Positionierung
LBL-Systeme verwenden ein Netzwerk aus festen Transpondern auf dem Meeresboden, die den Einsatzbereich des Fahrzeugs umgeben. Diese Transponder müssen unter Bezugnahme auf einen Oberflächenknoten kalibriert werden, um ihre Position zu bestimmen. Anschließend kann das Fahrzeug mithilfe von Triangulation innerhalb des Transponder-Netzwerks lokalisiert werden.
Ultra-Short Baseline – USBL-Positionierung
Das Unterwasser-Akustik-Positionierungssystem Subsonus USBL von Advanced Navigation
USBL-Systeme verwenden eine Wandleranordnung, die in der Regel unter einem Oberflächenfahrzeug angebracht ist. Die Rücklaufzeit und die Phasenverschiebung des akustischen Signals werden verwendet, um die Entfernung und Richtung des Wandlers zu bestimmen, die wiederum zur Festlegung der Position des Fahrzeugs relativ zum Oberflächenfahrzeug verwendet werden.
USBL-Systeme sind nicht so genau wie LBL-Systeme, aber flexibler und einfacher einzusetzen, da sie keine Installation eines kalibrierten Netzwerks von Unterwasserknoten erfordern.
Doppler-Geschwindigkeitslogs – DVL-Positionierung
Syrinx Subsea Doppler-Geschwindigkeitslog von Sonardyne
Anstelle von externen Transpondern oder Wandlern können UUVs auch Doppler-Geschwindigkeitsmesser (DVLs) verwenden, bei denen es sich um Sensoren handelt, die mehrere akustische Strahlen nutzen, um die Geschwindigkeit relativ zum Meeresboden zu schätzen. Diese Geschwindigkeitsmessungen können integriert werden, um eine kontinuierliche Schätzung der Positionsänderung zu liefern. DVLs sind als genaue Geschwindigkeitsschätzquelle für INS (Trägheitsnavigationssysteme) nützlich, und ein DVL-gestütztes INS kann als hochpräzise Navigations- und Positionierungshilfe für Unterwasserroboter eingesetzt werden.
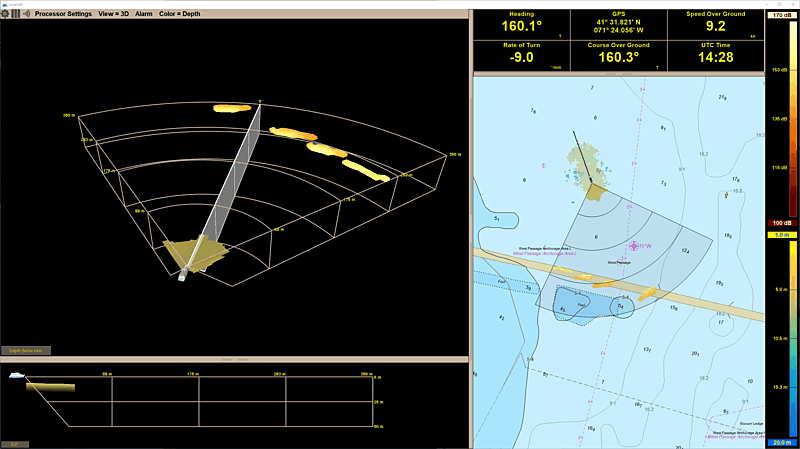
FarSounders neuer Zuschuss von der Rhode Island Commerce Corporation wird die Entwicklung seines maschinellen Lernsystems für die automatische Klassifizierung von Gefahren im Seeverkehr beschleunigen