Trouvez des fournisseurs et des fabricants de véhicules sous-marins autonomes, de technologie AUV, de planeurs sous-marins et de sous-marins autonomes pour des applications d'étude, de recherche et militaires.
Pilotes automatiques marins, communications pour véhicules de surface sans pilote, modules de gestion de l'alimentation, simulateurs marins et logiciels
Si vous concevez, construisez ou fournissez Fabricants de véhicules sous-marins autonomes AUV, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
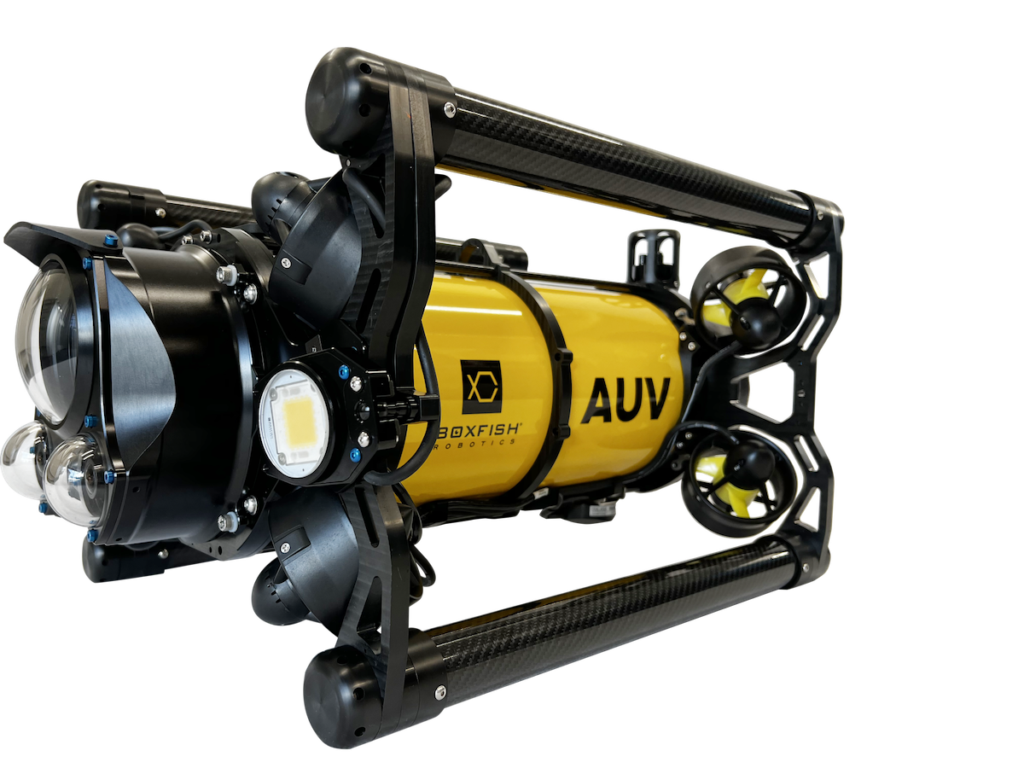
Les véhicules sous-marins autonomes (AUV) sont un sous-ensemble des véhicules sous-marins sans pilote (UUV) qui peuvent fonctionner sans contrôle en temps réel par un opérateur humain. Ils peuvent être programmés pour suivre des points de passage prédéterminés le long d’un itinéraire prédéfini et collecter des données ou activer d’autres charges utiles. Certains sous-marins autonomes peuvent utiliser des capacités d’intelligence artificielle (IA) pour prendre des décisions et réagir aux changements de leur environnement.
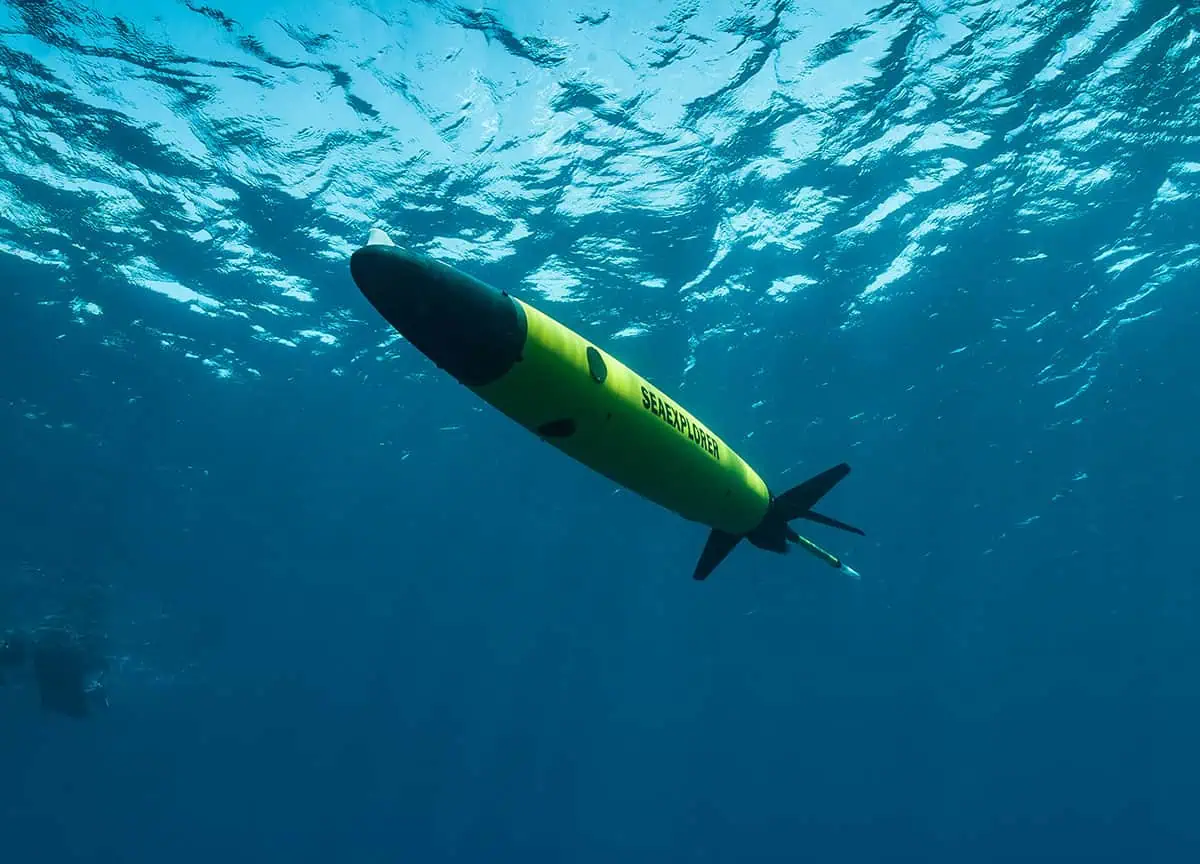
Planeurs sous-marins
La plupart des AUV sont alimentés par des batteries rechargeables, et certains peuvent également utiliser des piles à combustible ou l’énergie solaire. Les véhicules utilisent souvent des hélices et des propulseurs électriques pour se déplacer. Une sous-catégorie d’AUV, connue sous le nom de planeurs sous-marins, utilise une flottabilité variable pour modifier leur profondeur et utilisent des hydrofoils pour convertir ce mouvement en propulsion vers l’avant. Les planeurs sous-marins sont idéaux pour échantillonner des propriétés telles que la température et la salinité dans toute la colonne d’eau.
La navigation sous-marine autonome doit s’appuyer sur des méthodes autres que le GPS, car les ondes radio ne peuvent pas pénétrer très loin dans l’eau. Bien que le véhicule puisse faire surface de temps à autre afin d’obtenir des coordonnées GPS, ces données doivent être complétées par d’autres technologies. Les INS marins (systèmes de navigation inertielle) peuvent être utilisés pour obtenir des estimations de position, d’accélération et de vitesse, dont la précision peut être améliorée à l’aide d’un loch Doppler, un dispositif similaire à un sonar qui mesure la vitesse de déplacement sur le fond marin. La profondeur peut être mesurée à l’aide d’un capteur de pression.
Envoy AUV par Cellula Robotics
Capteurs et charges utiles des AUV
Les AUV peuvent transporter une grande variété de capteurs sous-marins et de charges utiles qui leur permettent de collecter des données et de cartographier l’environnement sous-marin. Il peut s’agir notamment de sonars à balayage latéral, de sonars à faisceau unique ou multifaisceaux, de magnétomètres, d’hydrophones et de capteurs chimiques. Étant donné l’impossibilité d’envoyer ou de recevoir des signaux électromagnétiques lorsqu’ils sont immergés, les données sont stockées à bord pour être récupérées ultérieurement.
XPONENTIAL USA 2026 réunit l'éducation et le réseautage, permettant aux professionnels d'échanger des idées, de tester des hypothèses et de s'engager avec des pairs pour soutenir une prise de décision plus éclairée sur les systèmes non embarqués, autonomes et robotiques