Encuentre proveedores y fabricantes de vehículos submarinos autónomos, tecnología AUV, planeadores submarinos y submarinos autónomos para aplicaciones de prospección, investigación y militares.
Si diseñas, construyes o suministras Fabricantes de vehículos submarinos autónomos AUV, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
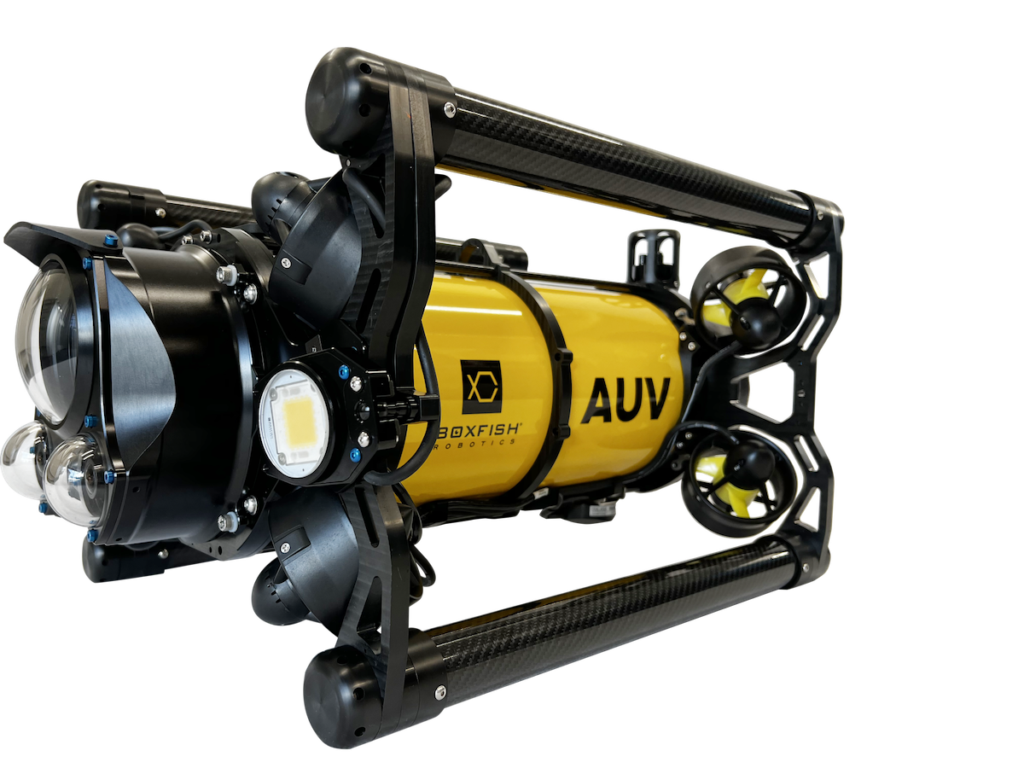
Los vehículos submarinos autónomos (AUV) son un subconjunto de los vehículos submarinos no tripulados (UUV) que pueden funcionar sin el control en tiempo real de un operador humano. Se pueden programar para seguir puntos de referencia de la misión a lo largo de una ruta predeterminada y recopilar datos o activar otras cargas útiles. Algunos submarinos autónomos pueden utilizar capacidades de inteligencia artificial (IA) para tomar decisiones y reaccionar a los cambios en su entorno.
Planeadores submarinos
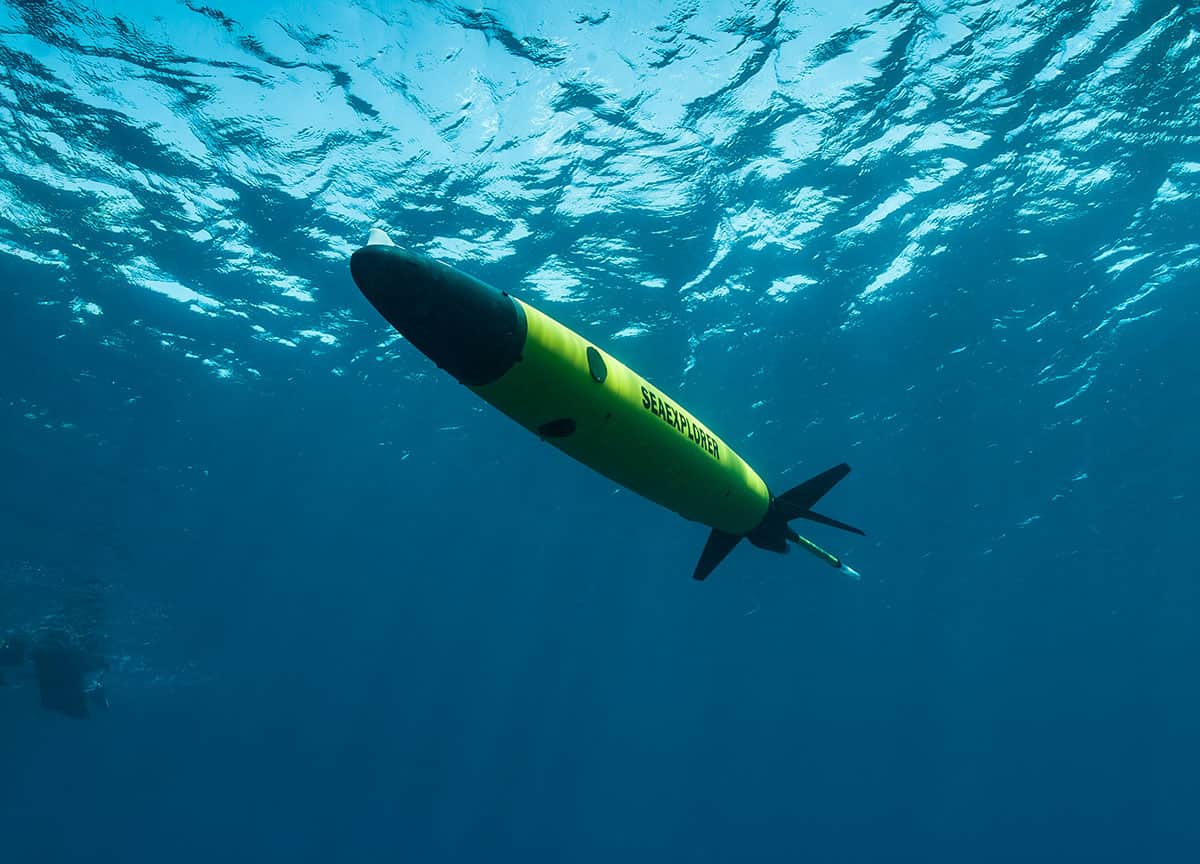
La mayoría de los AUV funcionan con baterías recargables, y algunos también pueden utilizar pilas de combustible o energía solar. Los vehículos suelen utilizar hélices y propulsores eléctricos para su propulsión. Un subconjunto de AUV, conocidos como planeadores submarinos, utilizan flotabilidad variable para cambiar su profundidad y utilizan hidroalas para convertir este movimiento en avance. Los planeadores submarinos son ideales para tomar muestras de propiedades como la temperatura y la salinidad en toda la columna de agua.
Planeador submarino autónomo SEAEXPLORER de ALSEAMAR
Navegación AUV
La navegación submarina autónoma debe basarse en métodos distintos al GPS, debido a la incapacidad de las radios para penetrar muy profundamente en el agua. Aunque el vehículo puede salir a la superficie de vez en cuando para obtener coordenadas GPS, estos datos deben complementarse con otras tecnologías. Marine INS (sistemas de navegación inercial) se pueden utilizar para obtener estimaciones de posición, aceleración y velocidad, cuya precisión se puede mejorar con un Doppler Velocity Log, un dispositivo similar a un sonar que mide la velocidad de desplazamiento sobre el fondo marino. La profundidad se puede medir utilizando un sensor de presión.
Envoy AUV de Cellula Robotics
Sensores y cargas útiles de los AUV
Los AUV pueden transportar una amplia variedad de sensores submarinos y cargas útiles que les permiten recopilar datos y cartografiar el entorno subacuático. Entre ellos se pueden incluir sonares de barrido lateral, sonares de haz único y multihaz, magnetómetros, hidrófonos y sensores químicos. Debido a la imposibilidad de enviar o recibir señales electromagnéticas cuando están sumergidos, los datos se almacenan a bordo para su posterior recuperación.
XPONENTIAL USA 2026 aúna educación y trabajo en red, permitiendo a los profesionales intercambiar puntos de vista, poner a prueba suposiciones y comprometerse con sus homólogos para apoyar una toma de decisiones más informada en los sistemas no tripulados, autónomos y robóticos
Cellula Robotics entregará un AUV Guardian propulsado por pila de combustible para el programa CAMP de la Unidad de Innovación de Defensa, asociándose con Metron y líderes de la industria para avanzar en las capacidades marítimas autónomas de larga duración para operaciones de defensa