



Marine AI Software
Discover cutting-edge solutions from leading global supplierstpgroup, a leading developer of cutting-edge artificial intelligence and machine learning-driven solutions that solve complex problems across a wide range of domains, has partnered with Unmanned Systems Technology (“UST”) to demonstrate their expertise in this field. The ‘Gold’ profile highlights how their software solutions enable safe and secure autonomous navigation for single or multiple manned and unmanned platforms, including USVs (unmanned surface vessels), UAVs (unmanned aerial vehicles), and UGVs (unmanned ground vehicles).

This software is being used globally from developing and delivering automated targets for the U.S Air Force; showing how self-controlled unmanned underwater vehicles (UUVs) can help to improve safety and endurance in high-risk marine environments; and optimising production for a global energy company based in the UAE.
Northstar provides assured, dynamic and risk-aware optimised path planning and collision avoidance for single or multiple platforms. Combining known information with live sensor data to create sophisticated dynamic 4-D models of the environment, Northstar is designed to reduce costs and human error on land, at sea and in the air.

The AI path-planning system takes into account multiple dynamic user-defined constraints, including specific platform characteristics, performance requirements, fuel consumption, time and cost. These are combined with environmental data from maps, forecasts and sensor data.
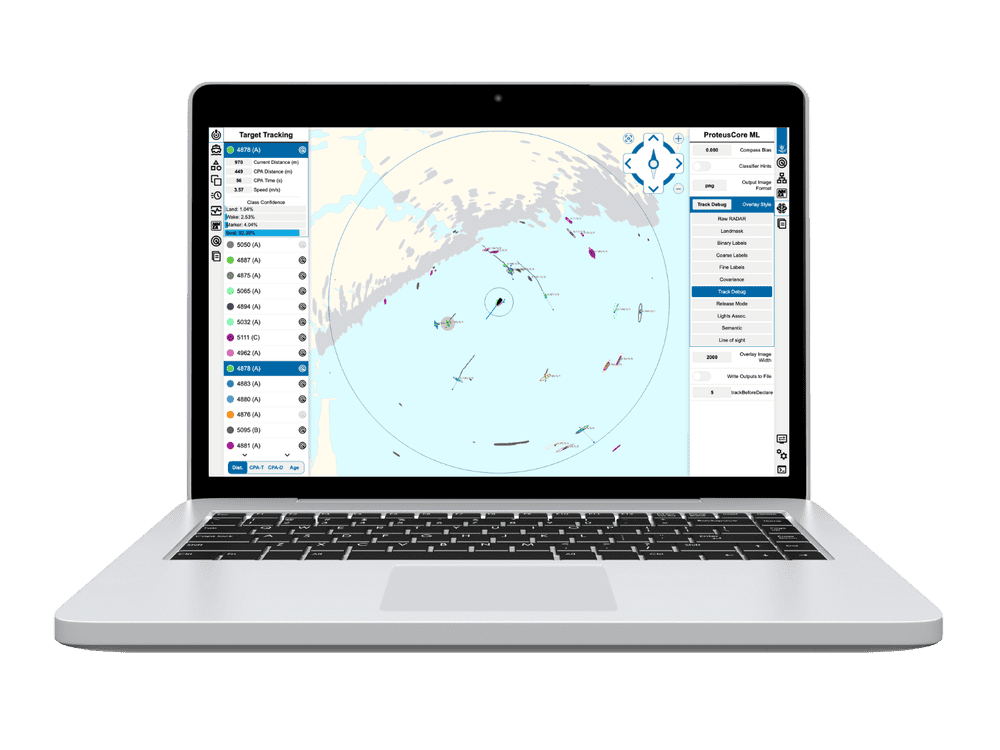
All these parameters are fed into a sophisticated digital world-building engine that accurately and dynamically models the environment, taking into account constantly-changing inputs from radar, LiDAR, sonar bathymetry, imaging sensors and more. The result is a multi-layered synthetic model that can be used to plan the most optimal route, avoiding any moving, stationary, mapped or unmapped obstacles.
To find out more about tpgroup and the Northstar AI-based autonomous navigation system software, please visit their profile page:
https://www.unmannedsystemstechnology.com/company/tpgroup/












