




Inertial Navigation Systems (INS)
Discover cutting-edge solutions from 9 leading global suppliers
OxTS has introduced a new Precision time Protocol (PTP) master functionality for all of the company’s next-generation inertial navigation systems (INS). PTP is a network-based time synchronisation protocol that is used to synchronise all clocks throughout a computer network, used in a variety of critical applications such as synchronising financial transactions, mobile phone tower transmissions and sub-sea acoustic arrays.
In many commercial organisations, millisecond-level device synchronisation, as offered with Network Time Protocol (NTP), is sufficient. However in UAV (unmanned aerial vehicle) surveying and automotive testing environments where there is more than one clock source (LiDAR and INS for example), final results can suffer from time drift if microsecond-level synchronisation is not used. Each system will have its own timing error, and over time this error will grow and create drift.
For surveyors, time drift can negatively impact pointclouds by making object recognition difficult, subsequently leading to blurring and double vision. For automotive engineers, when running campaigns, analysis of events within data may be misaligned, making the analysis more difficult and/or less efficient. To stamp out time drift it is important to use the most accurate clock-source available.
A key component of an INS is the GNSS receiver. The GNSS receiver acquires data, including timing information, directly from multiple GNSS constellations (GPS, GLONASS, BeiDou and Galileo). It is the GNSS receiver, coupled with the IMU (inertial measurement unit) within the INS, that allows users to benefit from the centimetre-level position accuracy that is so important in surveying and automotive testing environments.These satellite systems house the most accurate time source possible – atomic clocks – meaning that devices connected to a network that includes an INS can take advantage of this time source owing to the GNSS receiver within the INS.
By migrating from a traditional PPS hardware set-up, which involves connecting and wiring multiple cables, to a PTP set-up, which is essentially an ethernet ‘plug-and-play’ solution, users can also make day-to-day use of the equipment simpler and more efficient. This much improved hardware set-up allows surveyors and automotive test engineers to be up and running in a much shorter time frame than previously possible.
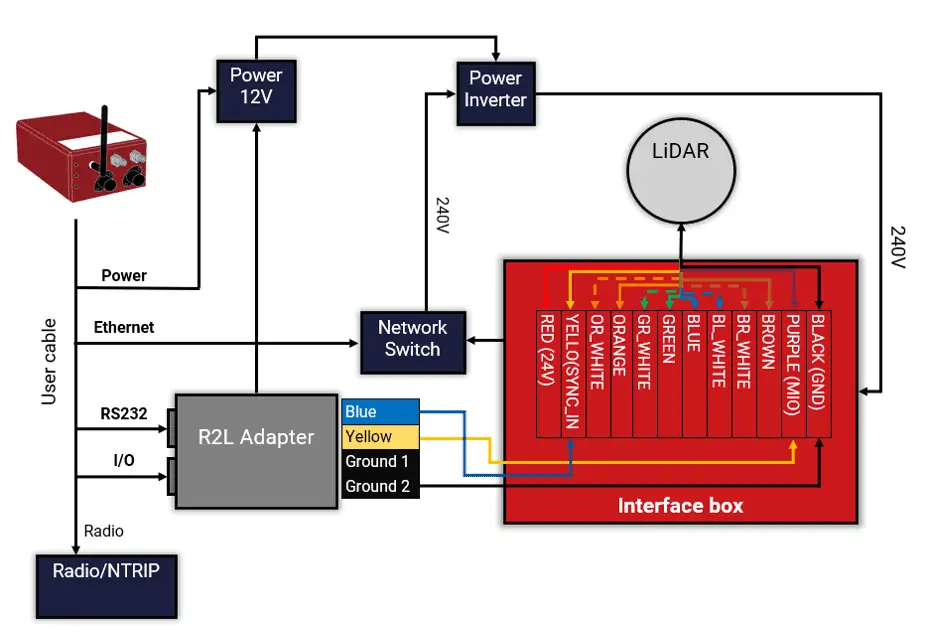
Without PTP – using PPS set-up
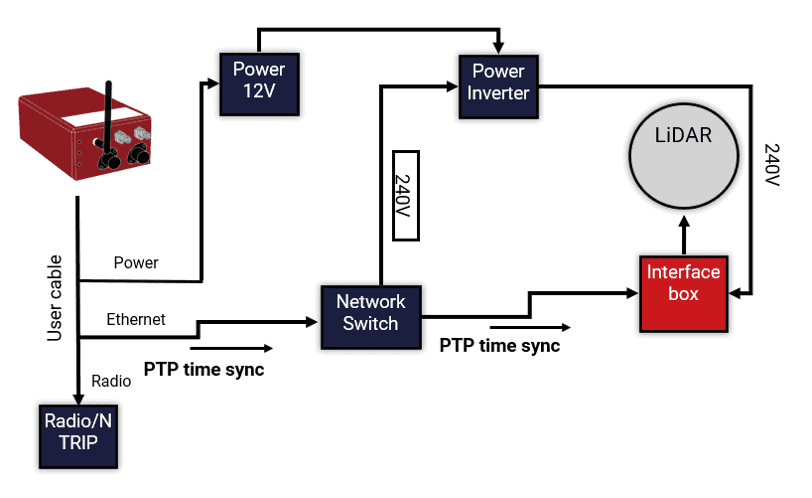
PTP enabled network
The addition of PTP also adds value for automotive users such as developers of self-driving cars. With cars-under-test incorporating multiple sensors (LiDAR scanners, cameras etc), synchronising all that data can help support accurate analysis after the test is complete. OxTS is continuing to develop its PTP solution by working on PTP slave functionality and improving the configuration process, which will provide greater flexibility in typical automotive set-ups that use DAQs for larger sensor networks.
PTP as a time synchronisation method is becoming more popular, particularly in the LiDAR industry, with manufacturers such as Ouster and Hesai enabling PTP on their sensors. The shorter ‘time to survey’ gives customers a much-enhanced user experience, and the higher quality final output on offer means that many users will demand their sensors are PTP compatible before considering them for their projects. This is something that manufacturers of complimentary sensors such as INS need to build into their product sets to allow them to be fit for the future.
OxTS inertial navigation systems that can benefit from PTP include the new xNAV650, a new small, lightweight and affordable INS for applications such as drones and robotics where payload size and weight matter.












