Fabricantes de veículos subaquáticos autónomos AUV
Principais fornecedores mundiais
Fabricantes de veículos subaquáticos autónomos
Encontre fornecedores e fabricantes de veículos subaquáticos autónomos, tecnologia AUV, planadores subaquáticos e submarinos autónomos para aplicações de pesquisa, investigação e militares
Pilotos automáticos marítimos, comunicações para veículos de superfície não tripulados, módulos de gestão de energia e simuladores marítimos e software
Se você projeta, constrói ou fornece Fabricantes de veículos subaquáticos autónomos AUV, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
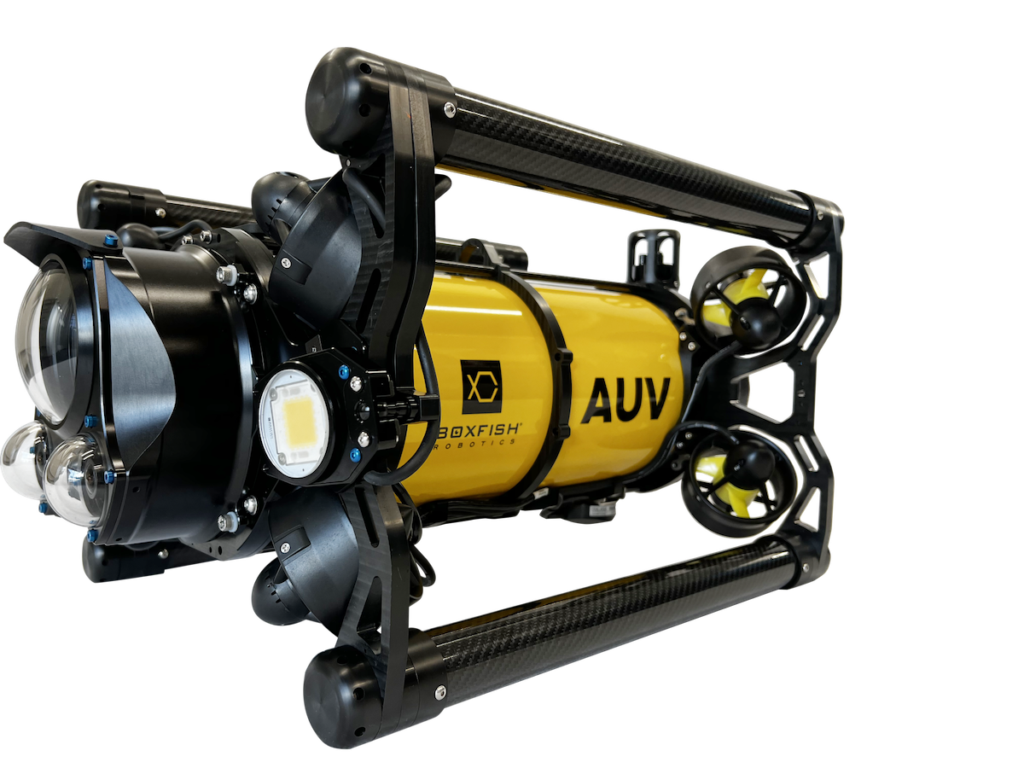
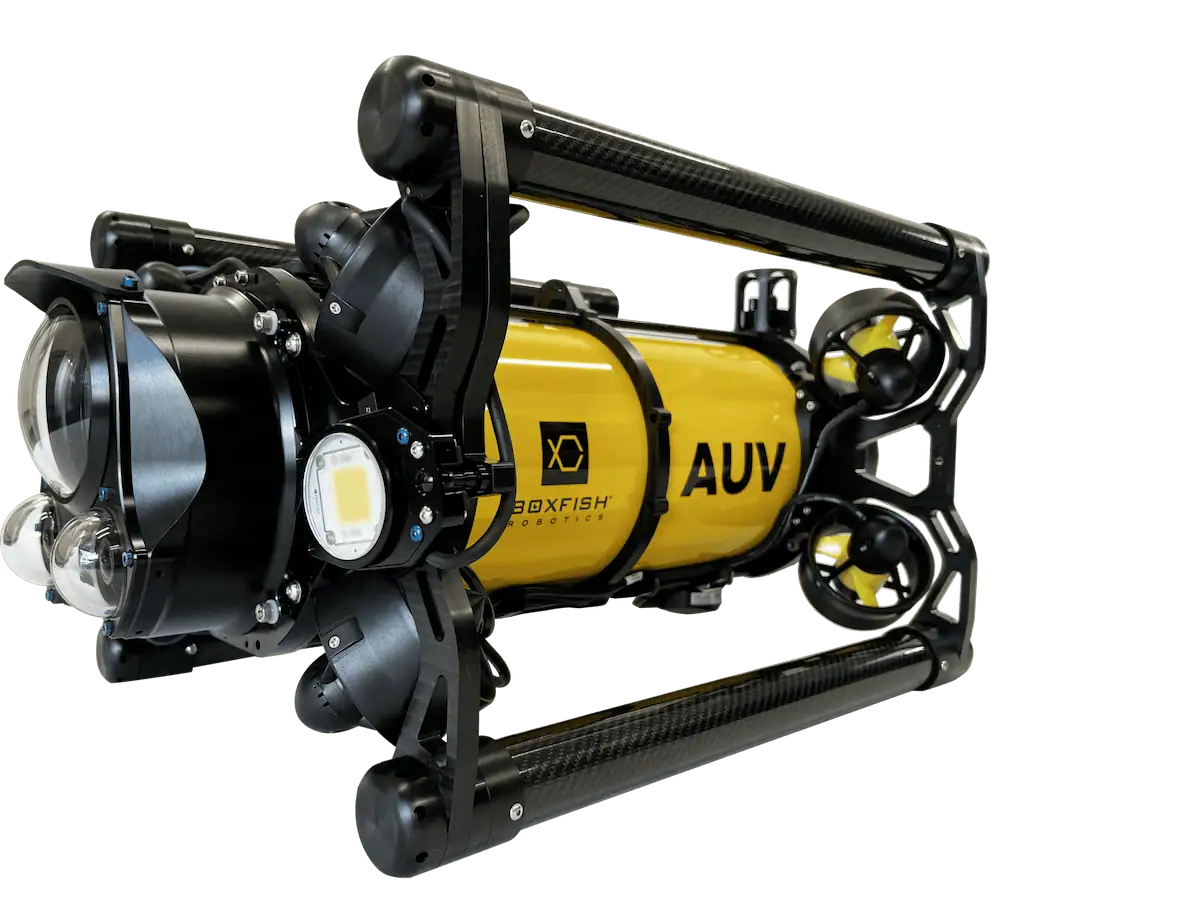
Boxfish AUV – AUV flutuante sem fios da Boxfish Robotics
Os veículos subaquáticos autónomos (AUVs) são um subconjunto dos veículos subaquáticos não tripulados (UUVs) que podem funcionar sem controlo em tempo real por parte de um operador humano. Eles podem ser programados para seguir pontos de referência da missão ao longo de uma rota predeterminada e coletar dados ou ativar outras cargas úteis. Alguns submarinos autônomos podem usar recursos de inteligência artificial (IA) para tomar decisões e reagir a mudanças em seu ambiente.
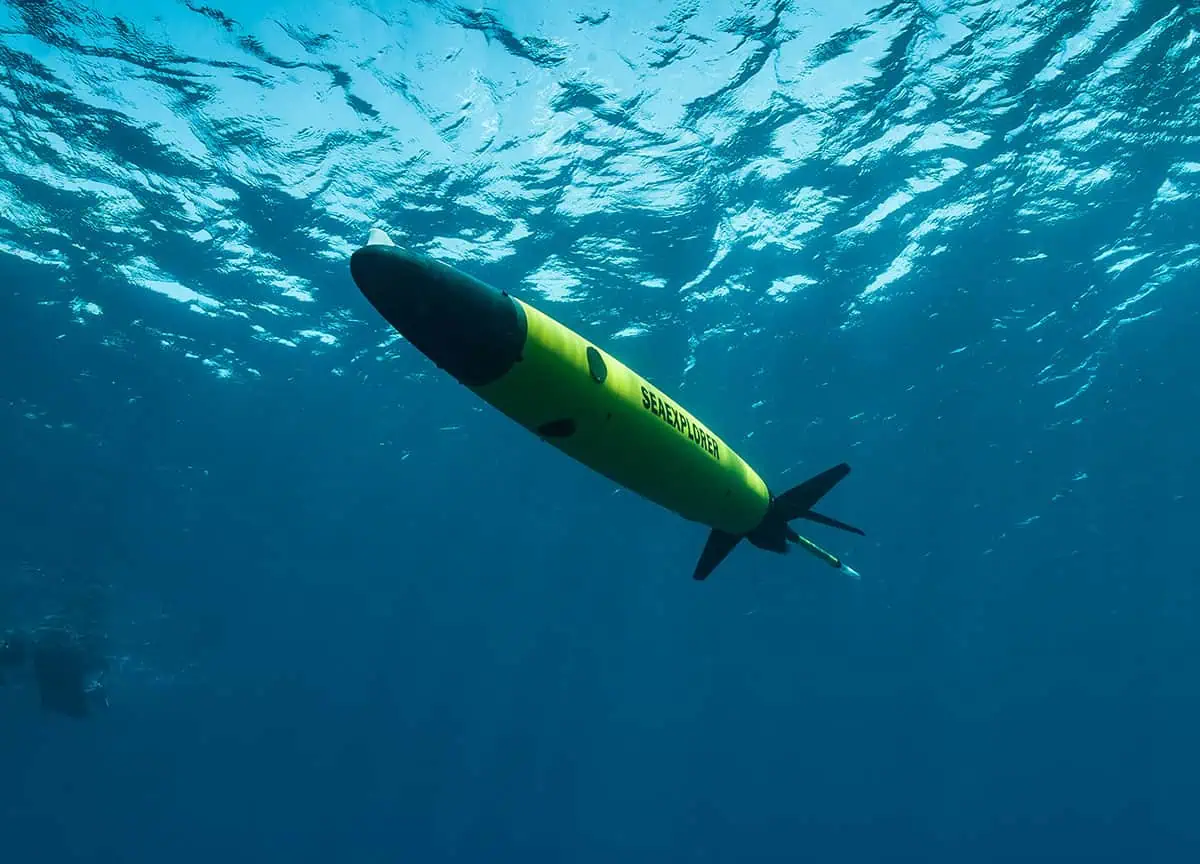
Planadores subaquáticos
A maioria dos AUVs é alimentada por baterias recarregáveis, e alguns também podem usar células de combustível ou energia solar. Os veículos costumam usar hélices e propulsores elétricos para propulsão. Um subconjunto de AUVs, conhecido como planadores subaquáticos, usa flutuabilidade variável para alterar a sua profundidade e utilizam hidrofólios para converter este movimento em movimento para a frente. Os planadores subaquáticos são ideais para recolher amostras de propriedades como a temperatura e a salinidade em toda a coluna de água.
Planador subaquático autónomo SEAEXPLORER da ALSEAMAR
Navegação AUV
A navegação subaquática autónoma deve basear-se em métodos diferentes do GPS, devido à incapacidade dos rádios de penetrar muito profundamente na água. Embora o veículo possa emergir de vez em quando para obter coordenadas GPS, esses dados devem ser complementados por outras tecnologias. O INS marítimo (Sistemas de Navegação Inercial) pode ser usado para obter estimativas de posição, aceleração e velocidade, cuja precisão pode ser melhorada com um Doppler Velocity Log, um dispositivo semelhante a um sonar que mede a velocidade de deslocamento sobre o fundo do mar. A profundidade pode ser medida usando um sensor de pressão.
Envoy AUV da Cellula Robotics
Sensores e cargas úteis do AUV
Os AUVs podem transportar uma grande variedade de sensores subaquáticos e cargas úteis que lhes permitem recolher dados e mapear o ambiente subaquático. Estes podem incluir sonares de varredura lateral, sonares de feixe único e múltiplo, magnetómetros, hidrofones e sensores químicos. Devido à incapacidade de enviar ou receber sinais eletromagnéticos quando submersos, os dados são armazenados a bordo para recuperação posterior.
XPONENTIAL USA 2026 brings education and networking together, enabling professionals to exchange insights, test assumptions, and engage with peers to support more informed decision-making across uncrewed, autonomous, and robotics systems