Find suppliers & manufacturers of Marine Propulsion Systems for unmanned underwater vehicles; UUV, AUV, ROV, including Marine Thrusters, Subsea Electric Motors & Variable-Buoyancy Propulsion
If you design, build or supply Marine Propulsion Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
The most common form of marine propulsion system for AUVs (autonomous underwater vehicles) and ROVs (remotely operated vehicles) is the marine thruster. Underwater thrusters are propulsion devices that combine a propeller with a hydraulic or electric motor. Hydraulic thruster systems take up a lot of space and weight due to the extra components such as valves and pipes, and so are usually found only on the larger work-class ROVs.
Subsea Electric Motors
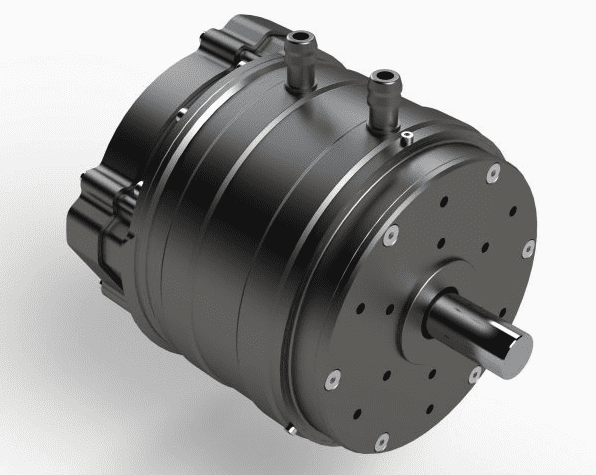
Nova Maritime Motors by Plettenberg
Electric underwater thrusters usually use brushless DC or permanent magnet synchronous motors. These motors may be sealed within air- or oil-filled cavities, or use a flooded design that allows water to come into contact with the motor, providing extra cooling and lubrication.
Some UUVs (unmanned underwater vehicles) may have thrusters arranged in such a way as to provide vectored thrust, which allows the vehicle to precisely control its direction of movement. ROVs are commonly equipped with four, six, or eight ROV thrusters. At least six thrusters are required to provide full six-degree-of-freedom movement (surge, heave, sway, roll, pitch and yaw).
Underwater Propellers
Propellers, which convert rotation to thrust, need to be matched to the motor torque for maximum efficiency. They also need to be manufactured from a corrosion resistant material such as an aluminium-stainless steel alloy, as they will be constantly submerged in saltwater.
Variable-Buoyancy Propulsion
Underwater gliders use a different form of propulsion known as variable-buoyancy propulsion. This method utilises an internal bladder that can be inflated or deflated to change the density of the vehicle, making it ascend or sink as required. The glider uses hydrofoils to generate forward motion as the vehicle descends, with the result that the movement pattern of the glider resembles a sawtooth profile. Due to the lack of components such as motors, they require very little power and can operate for longer durations than many typical AUVs.
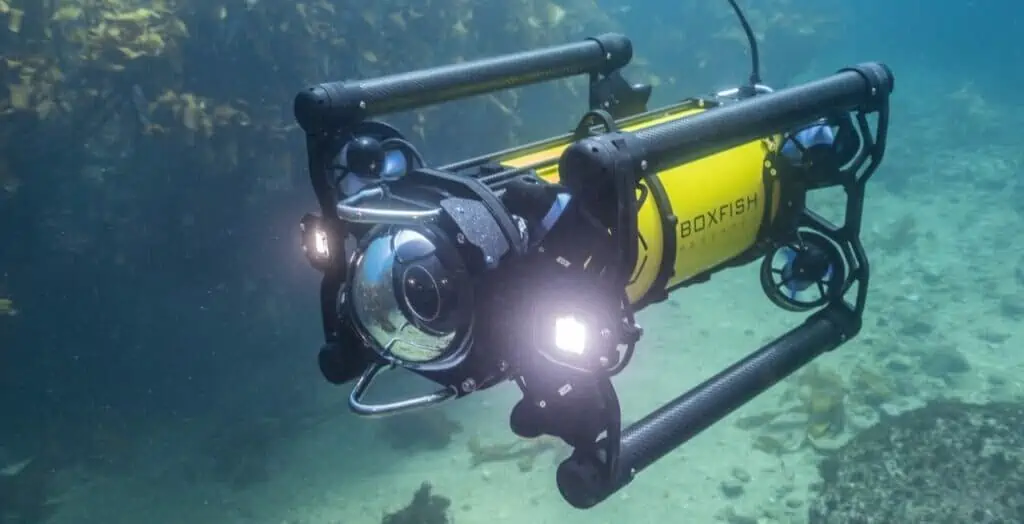
Boxfish ROV with Eight 3D-Vectored Marine Thrusters
RAD’s solutions enable vessels to operate with exceptionally low acoustic, vibration and thermal signatures, while reducing maintenance requirements and operating costs
Gabler Maschinenbau GmbH has acquired SubCtech, combining expertise and resources to expand capabilities in maritime technology, ocean monitoring, and offshore energy systems
AGISTAR highlights the OXR T100, a compact electric outboard motor designed for versatile marine operations, offering quiet performance, remote control, and rapid tool-free installation
Alva Industries enhances rim drive thrusters with FiberPrinted™ technology, delivering superior performance, efficiency, and durability for marine applications
The JETTE robotic controlled propulsion system from Tiburon Subsea draws on dual fore and aft thrusters to outfit unmanned underwater vehicles (UUVs) with increased speed, variable controls and maneuverability
Ongoing conflicts and threats in parts of the world have influenced the demand for USVs with the global market for unmanned surface vessels (USVs) witnessing substantial growth
Developer and manufacturer of tailored propulsion solutions for the maritime industry Plettenberg has released the NOVA Maritime Series of inrunner BLDC motors
To qualify, Fairbanks Morse Defense’s nForcer engine must perform for a minimum of 720 hours in a land-based test environment without human intervention
In this case study, Plettenberg explains how it developed a tailored propulsion system for Feller Yachting’s Ella uncrewed light transport...
Mar 15, 2023
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.