Encuentre proveedores y fabricantes de sistemas de propulsión marina para vehículos submarinos no tripulados (UUV, AUV, ROV), incluidos propulsores marinos, motores eléctricos submarinos y propulsión de flotabilidad variable.
Si diseñas, construyes o suministras Sistemas de propulsión marina, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
La forma más común de sistema de propulsión marina para AUV (vehículos submarinos autónomos) y ROV (vehículos operados a distancia) es el propulsor marino. Los propulsores submarinos son dispositivos de propulsión que combinan una hélice con un motor hidráulico o eléctrico. Los sistemas de propulsión hidráulicos ocupan mucho espacio y pesan mucho debido a los componentes adicionales, como válvulas y tuberías, por lo que normalmente solo se encuentran en los ROV de trabajo más grandes.
Motores eléctricos submarinos
Motores marítimos Nova de Plettenberg
Los propulsores submarinos eléctricos suelen utilizar motores síncronos sin escobillas de corriente continua o de imán permanente. Estos motores pueden estar sellados dentro de cavidades llenas de aire o aceite, o utilizar un diseño inundado que permite que el agua entre en contacto con el motor, lo que proporciona una refrigeración y lubricación adicionales.
Algunos UUV (vehículos submarinos no tripulados) pueden tener propulsores dispuestos de tal manera que proporcionan un empuje vectorial, lo que permite al vehículo controlar con precisión su dirección de movimiento. Los ROV suelen estar equipados con cuatro, seis u ocho propulsores ROV. Se necesitan al menos seis propulsores para proporcionar un movimiento completo de seis grados de libertad (avance, elevación, balanceo, giro, cabeceo y guiñada).
Hélices submarinas
Las hélices, que convierten la rotación en empuje, deben adaptarse al par motor para obtener la máxima eficiencia. También deben fabricarse con un material resistente a la corrosión, como una aleación de aluminio y acero inoxidable, ya que estarán constantemente sumergidas en agua salada.
Propulsión de flotabilidad variable
Los planeadores submarinos utilizan una forma diferente de propulsión conocida como propulsión de flotabilidad variable. Este método utiliza una cámara interna que se puede inflar o desinflar para cambiar la densidad del vehículo, haciendo que ascienda o se hunda según sea necesario. El planeador utiliza hidroalas para generar movimiento hacia adelante a medida que el vehículo desciende, con el resultado de que el patrón de movimiento del planeador se asemeja a un perfil en forma de diente de sierra. Debido a la ausencia de componentes como motores, requieren muy poca energía y pueden funcionar durante más tiempo que muchos AUV típicos.
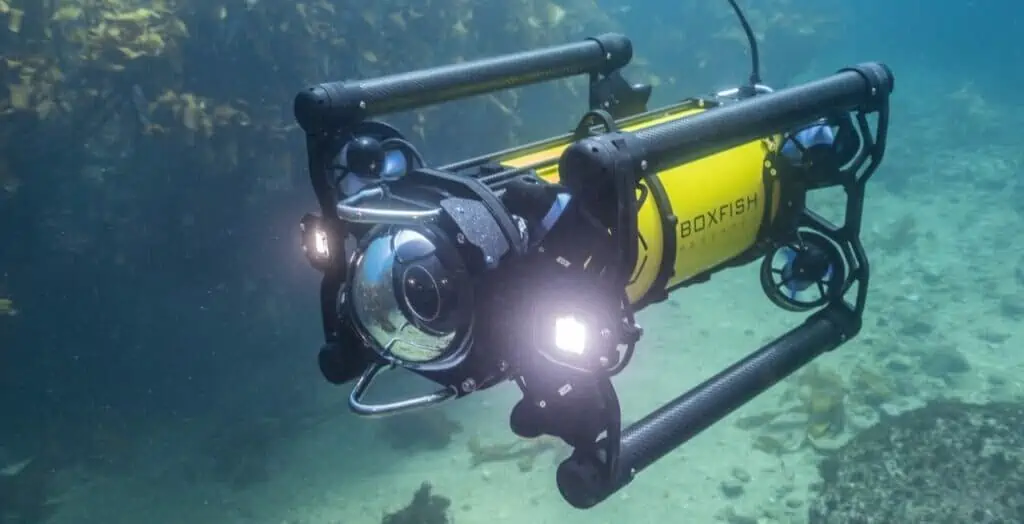
ROV Boxfish con ocho propulsores marinos vectoriales 3D