Se progettate, costruite o fornite Navigazione e posizionamento subacquei, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
The Comprehensive Guide to Underwater Navigation & Subsea Positioning for ROV, UUV & AUV Systems
Panoramica da
Sarah Simpson
Aggiornato:
Posizionamento sottomarino per UUV, AUV e ROV
La navigazione, il posizionamento e il tracciamento sottomarini per UUV (veicoli sottomarini senza equipaggio), AUV (veicoli sottomarini autonomi) e ROV (veicoli telecomandati) vengono solitamente effettuati utilizzando metodi acustici o basati sul movimento, poiché le onde RF e altre onde elettromagnetiche non viaggiano su distanze utili sott’acqua. Ciò significa che, a differenza dei veicoli senza equipaggio in altri settori, i veicoli robotici subacquei non possono fare affidamento su segnali GNSS aggiornati continuamente per ottenere una posizione fissa.
I sistemi di navigazione e posizionamento acustici utilizzano nodi di superficie fissi con una posizione GNSS nota e una serie di transponder subacquei che possono essere pingati acusticamente per fornire informazioni sulla loro distanza e angolazione rispetto al nodo di superficie.
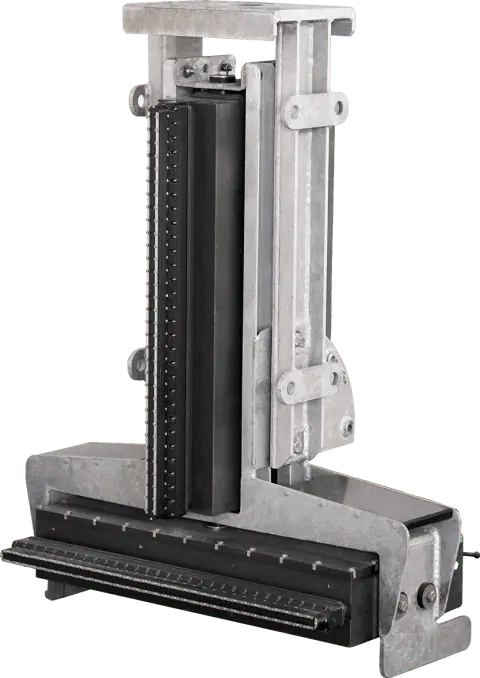
Ramses – Ricetrasmettitore di posizionamento LBL ad alta precisione di iXblue
Le due forme più comuni di sistemi di posizionamento acustico sono Long Baseline (LBL) e Ultra-Short Baseline (USBL).
Long Baseline – Posizionamento LBL
I sistemi LBL utilizzano una rete di transponder fissi sul fondale marino che circonda l’area operativa del veicolo. Questi transponder devono essere calibrati con riferimento a un nodo di superficie per fissarne la posizione, quindi è possibile utilizzare la triangolazione per localizzare il veicolo all’interno della rete di transponder.
Posizionamento a linea di base ultra corta – USBL
Sistema di posizionamento acustico subacqueo Subsonus USBL di Advanced Navigation
I sistemi USBL utilizzano un array di trasduttori che viene tipicamente montato sotto un’imbarcazione di superficie. Il tempo di ritorno e lo sfasamento del segnale acustico vengono utilizzati per determinare la distanza e la direzione del trasduttore, che a loro volta vengono utilizzati per fissare la posizione del veicolo rispetto all’imbarcazione di superficie.
I sistemi USBL non sono precisi come i sistemi LBL, ma sono più flessibili e facili da implementare poiché non richiedono l’installazione di una rete calibrata di nodi sottomarini.
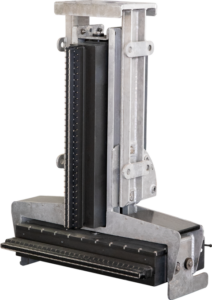
Registratori di velocità Doppler – Posizionamento DVL
Log di velocità Doppler subacqueo Syrinx di Sonardyne
Invece di transponder o trasduttori esterni, gli UUV possono anche utilizzare Doppler Velocity Log (DVL), sensori che utilizzano più fasci acustici per stimare la velocità rispetto al fondale marino. Queste letture di velocità possono essere integrate per fornire una stima continua del cambiamento di posizione. I DVL sono utili come fonte accurata di stima della velocità per gli INS (sistemi di navigazione inerziale), e un INS assistito da DVL può essere utilizzato come ausilio di navigazione e posizionamento ad alta precisione per la robotica subacquea.
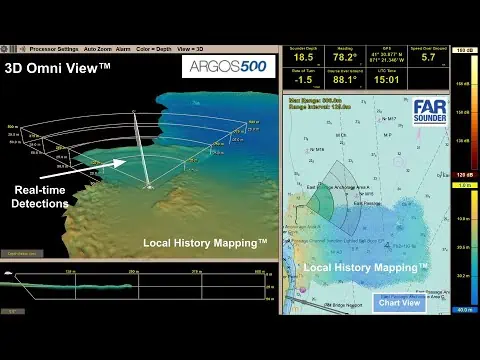
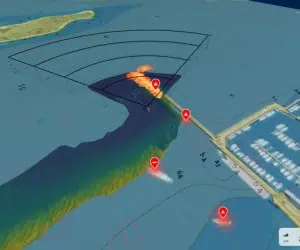
La nuova sovvenzione di FarSounder da parte della Rhode Island Commerce Corporation accelererà lo sviluppo dei suoi framework di apprendimento automatico per la classificazione automatizzata dei rischi marittimi.