Le sonar à vision avant (FLS) est une technologie d'imagerie acoustique sous-marine qui offre une visibilité en temps réel de l'environnement devant une plate-forme marine. Largement utilisé sur les véhicules télécommandés (ROV) et les véhicules sous-marins autonomes (AUV), le FLS facilite la détection d'obstacles, la navigation et la connaissance de la situation dans des environnements à faible visibilité ou sans GPS. Ces systèmes génèrent des images acoustiques en 2D ou 3D pour faciliter la prévention des collisions, l'inspection, la cartographie et la planification autonome des trajectoires.
Ce guide présente les fournisseurs de systèmes de sonar à vision frontale destinés à l'énergie offshore, à la construction sous-marine, à la défense, à la recherche et aux opérations maritimes commerciales, en mettant l'accent sur les systèmes conçus pour répondre aux contraintes SWaP, à l'autonomie des véhicules, aux interfaces de données en temps réel et à la fiabilité des performances dans les eaux troubles ou encombrées.
Si vous concevez, construisez ou fournissez Sonar à balayage vers l’avant, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Le sonar à vision avant (FLS) est une catégorie de technologie d’imagerie acoustique sous-marine conçue pour fournir des données visuelles en temps réel de l’environnement devant un navire ou une plate-forme maritime.
Particulièrement cruciales pour les véhicules sous-marins sans pilote tels que les ROV et les AUV, les solutions FLS contribuent à atténuer les risques opérationnels en détectant les obstacles, en cartographiant le terrain sous-marin et en permettant une navigation précise dans des conditions encombrées ou de faible visibilité.
Capacités essentielles pour les plates-formes sans pilote
Les véhicules marins sans pilote s’appuient sur des technologies telles que le sonar avant pour remplacer la vision humaine et compenser les capacités limitées des capteurs embarqués. Ces systèmes sonars projettent des impulsions acoustiques vers l’avant et interprètent les échos renvoyés pour créer des images en deux dimensions (2D) ou en trois dimensions (3D) de l’environnement sous-marin environnant. Cette capacité d’imagerie est indispensable pour garantir une maniabilité sûre et la réussite des missions dans divers scénarios opérationnels, notamment l’exploration en eaux profondes, l’inspection structurelle et la construction sous-marine.
Les ROV utilisent généralement un sonar avant pour faciliter le pilotage dans des espaces confinés ou à proximité d’infrastructures critiques, tandis que les AUV bénéficient d’une détection à longue portée pour la navigation autonome en eaux libres. Dans les deux cas, le retour vidéo en temps réel du sonar améliore la connaissance de la situation et la prise de décision, en particulier lorsque le GPS n’est pas disponible et que la visibilité est réduite.
Principales applications du sonar avant
Prévention des collisions
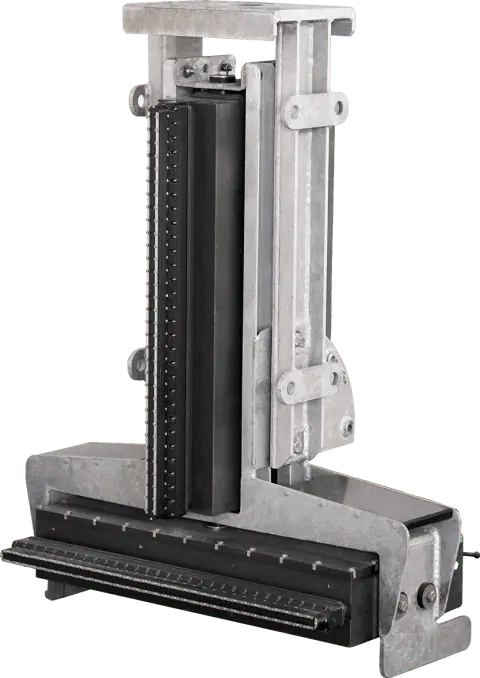
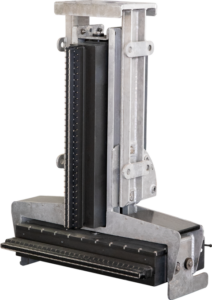
Sonar à vision frontale Vigilant FLS® de Wavefront Systems
Le sonar à vision avant permet d’assurer la sécurité de la navigation des véhicules sous-marins sans pilote en détectant les obstacles potentiels en temps réel. Que la plate-forme soit un ROV naviguant dans des infrastructures sous-marines ou un AUV transitant dans un environnement sous-marin complexe, le FLS fournit un retour d’information immédiat qui permet d’effectuer des manœuvres d’évitement. Ces systèmes identifient les dangers tels que les affleurements rocheux, les épaves, les champs de débris et les câbles sous-marins, qui peuvent ne pas apparaître sur les cartes marines ou être visibles par les systèmes optiques. En intégrant le FLS à leurs systèmes de guidage embarqués, les plateformes sans pilote peuvent exécuter des protocoles d’évitement de collision avec une précision et une autonomie accrues.
Inspection sous-marine
Le FLS est utilisé dans les tâches d’inspection sous-marine où les outils visuels peuvent être inefficaces en raison d’un faible éclairage, de la turbidité ou d’espaces restreints. Les missions d’inspection par ROV autour des pipelines, des collecteurs sous-marins, des plates-formes pétrolières ou des coques de navires bénéficient de l’imagerie acoustique haute résolution fournie par le FLS. Ces systèmes permettent aux opérateurs d’évaluer à distance l’intégrité structurelle, d’identifier les salissures biologiques, de détecter les fuites et de guider le positionnement précis pour les interventions de maintenance. Dans les environnements confinés ou dangereux, le FLS garantit la sécurité en aidant à éviter tout contact involontaire avec des infrastructures sous-marines fragiles ou précieuses.
Cartographie et levés
Le FLS, en particulier dans sa configuration multifaisceaux, constitue un outil puissant pour la cartographie sous-marine et les levés hydrographiques. Les AUV équipés d’un sonar multifaisceaux à balayage vers l’avant peuvent générer des modèles topographiques en temps réel du fond marin, inspecter les mouvements des sédiments ou surveiller l’érosion sous-marine. Ces systèmes sont précieux pour la recherche, la planification de parcs éoliens offshore, les évaluations environnementales et l’archéologie marine. Grâce à sa capacité à cartographier rapidement et avec une grande précision de vastes zones, le FLS améliore l’efficacité et la sécurité de l’exploration et de la cartographie sous-marines.
Recherche et récupération
Dans le cadre de missions urgentes telles que la recherche et le sauvetage ou la récupération d’objets immergés, le FLS offre une solution fiable pour localiser des objets sous l’eau. Les capacités de détection à longue portée du FLS permettent aux utilisateurs de balayer rapidement de vastes zones et d’identifier les anomalies pouvant indiquer la présence de véhicules, de conteneurs ou de restes humains immergés. Utilisé par les garde-côtes, les forces navales et les entrepreneurs en récupération, le FLS fournit une confirmation visuelle en temps réel dans des situations où le déploiement de plongeurs ou le recours exclusif à des instruments visuels serait inefficace ou dangereux.
Suivi de cibles et classification d’objets
Au-delà de la détection de base, les systèmes FLS avancés sont capables de suivre les mouvements des objets sous-marins et d’aider à leur classification. Cette capacité est essentielle dans les applications de défense et de sécurité, où il est vital de distinguer la vie marine, les débris et les menaces potentielles telles que les véhicules intrus. Les algorithmes de reconnaissance de formes, associés à l’imagerie FLS haute résolution, permettent l’identification et le suivi en temps réel des menaces, améliorant ainsi la connaissance de la situation des plateformes autonomes et semi-autonomes.
Navigation dans des environnements encombrés ou confinés
Les véhicules sous-marins sans pilote opèrent souvent dans des environnements où le GPS n’est pas disponible et où la visibilité est compromise, tels que l’intérieur d’épaves, les ports ou sous la glace. Le sonar de navigation avant aide ces plateformes à naviguer en toute sécurité en fournissant des images acoustiques détaillées de l’espace environnant. Associé à des systèmes de navigation inertielle et à des techniques SLAM (localisation et cartographie simultanées), le FLS contribue à un positionnement précis et à une planification de trajectoire en temps réel, ce qui le rend indispensable dans les environnements exigus ou inconnus.
Évitement d’obstacles dans les missions autonomes
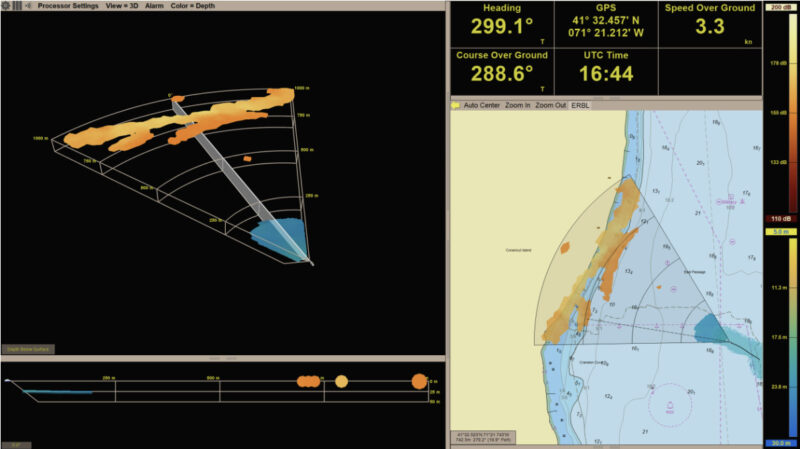
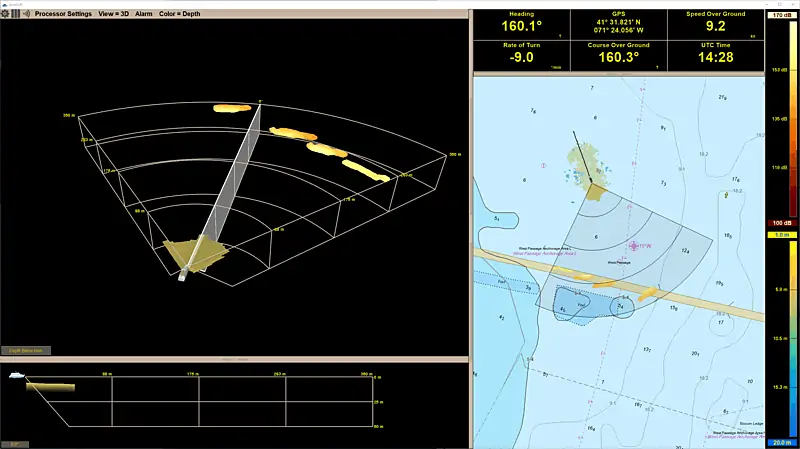
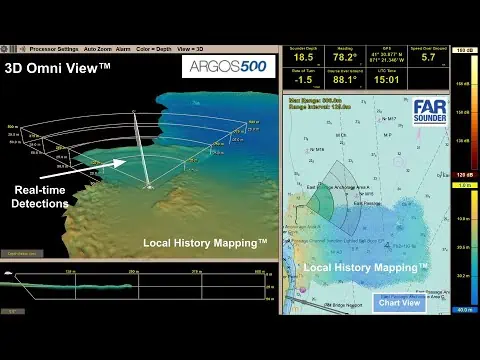
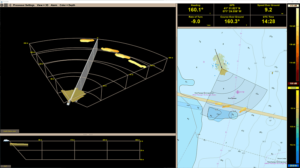
Système de sonar à vision frontale Argos 1000 de FarSounder
Les missions sous-marines autonomes nécessitent une vigilance constante afin d’éviter les dangers dynamiques et statiques. Le FLS permet aux AUV d’évaluer de manière autonome leur trajectoire et de corriger leur cap sans intervention humaine. Ces capacités sont essentielles lors de missions à longue distance ou à haut risque, où les conditions environnementales peuvent changer rapidement. Le FLS fournit une couche de capteurs à vision avant qui améliore la fiabilité et l’autonomie des systèmes de navigation sans pilote.
Assistance aux opérations d’amarrage et de récupération
Le FLS est souvent utilisé pendant les phases d’amarrage et de récupération des missions ROV et AUV, en particulier lorsque la précision est requise. Les systèmes FLS peuvent guider les véhicules vers des stations d’amarrage ou à travers des points d’entrée étroits avec une précision de l’ordre du centimètre, même dans des conditions de mauvaise visibilité. Cette application est particulièrement pertinente dans les cycles de missions autonomes, où la récupération sans intervention humaine est essentielle pour les opérations multi-sorties ou la surveillance sous-marine persistante.
Technologies et configurations des sonars à balayage frontal
Les systèmes de sonars à balayage frontal sont disponibles dans une variété de configurations pour répondre aux différentes exigences des missions. Les sonars à balayage frontal 2D traditionnels offrent une imagerie plane adaptée à la navigation de base, tandis que les systèmes de sonars à balayage frontal 3D fournissent des reconstructions volumétriques pour une meilleure interprétation des environnements complexes.
Les configurations multifaisceaux offrent un champ de vision plus large et une résolution plus élevée, ce qui les rend idéales pour les tâches de cartographie et de classification. Le sonar de navigation à balayage vers l’avant, souvent intégré à des systèmes de contrôle autonomes, combine des capacités d’imagerie et de planification de trajectoire pour un fonctionnement entièrement automatisé.
De nombreux systèmes comprennent des transducteurs de sonar à balayage vers l’avant modulaires qui peuvent être adaptés à différentes tailles de véhicules et à différents budgets énergétiques. Des options d’intégration sont disponibles pour les véhicules câblés et non câblés, avec une transmission de données en temps réel prise en charge dans les deux cas.
Applications commerciales et maritimes du sonar à balayage frontal
Navires de croisière et grands navires
Les technologies de sonar à balayage frontal sont également utilisées dans d’autres applications maritimes commerciales. Les navires de croisière et les navires commerciaux utilisent des sonars à balayage frontal et des sonars d’imagerie pour naviguer en toute sécurité dans les passages étroits, les ports peu profonds ou les zones mal cartographiées. Les FLS commerciaux améliorent les opérations portuaires, tandis que les navires de recherche les utilisent pour des missions d’exploration où l’observation visuelle n’est pas possible.
Ces systèmes sont particulièrement utiles dans les eaux glacées ou boueuses, où les systèmes de vision traditionnels sont moins performants. Avec le développement du transport maritime autonome, les FLS deviennent également la pierre angulaire des futurs systèmes de navigation des navires.
Détection des poissons et gestion des pêcheries
Le FLS joue également un rôle important dans la pêche commerciale et la gestion durable des pêcheries. En projetant des faisceaux acoustiques devant un navire, les systèmes FLS aident les opérateurs à détecter les bancs de poissons en temps réel et à surveiller leurs mouvements avec une plus grande précision que les sonars traditionnels orientés vers le bas. Cela permet une exploitation plus efficace tout en minimisant les perturbations environnementales et les prises accessoires. En plus de soutenir les flottes de pêche commerciale, le FLS contribue à la recherche en biologie marine en facilitant les études non invasives sur les populations et les comportements. Grâce à sa capacité à fournir des images acoustiques détaillées dans les eaux troubles ou profondes, le FLS est un outil essentiel dans les efforts continus visant à équilibrer le rendement commercial et la préservation des écosystèmes.
Résumé du sonar à vision avant
Le sonar à vision frontale offre un avantage sensoriel essentiel pour les opérations maritimes commerciales et sans pilote. Qu’il s’agisse d’améliorer la connaissance de la situation pour les ROV et les AUV, ou d’optimiser les tâches d’évitement d’obstacles, de navigation et d’inspection, la technologie FLS est indispensable dans les missions automatisées et surveillées par l’homme. Grâce aux progrès continus en matière de résolution, de portée et de visualisation 3D, les systèmes FLS continuent d’étendre leur rôle dans divers secteurs maritimes, garantissant des opérations sous-marines plus sûres et plus efficaces.
La nouvelle subvention accordée à FarSounder par la Rhode Island Commerce Corporation permettra d'accélérer le développement de ses cadres d'apprentissage automatique pour la classification automatisée des risques maritimes.