In this video, Cambridge Pixel explain how their radar processing technologies provide a core set of capabilities for USV developers, including:
- Interface options to a wide range of maritime and specialist radars
- A highly configurable target tracker
- Fusion of tracks from multiple radars and auxiliary data such as AIS and ADS-B
- Camera control from radar, slew-to-cue and video-based tracking
- Mission recording of radar video, tracks, AIS, video and navigation data
- Display applications for remote monitoring
- Simulation and training.
Watch to learn more:
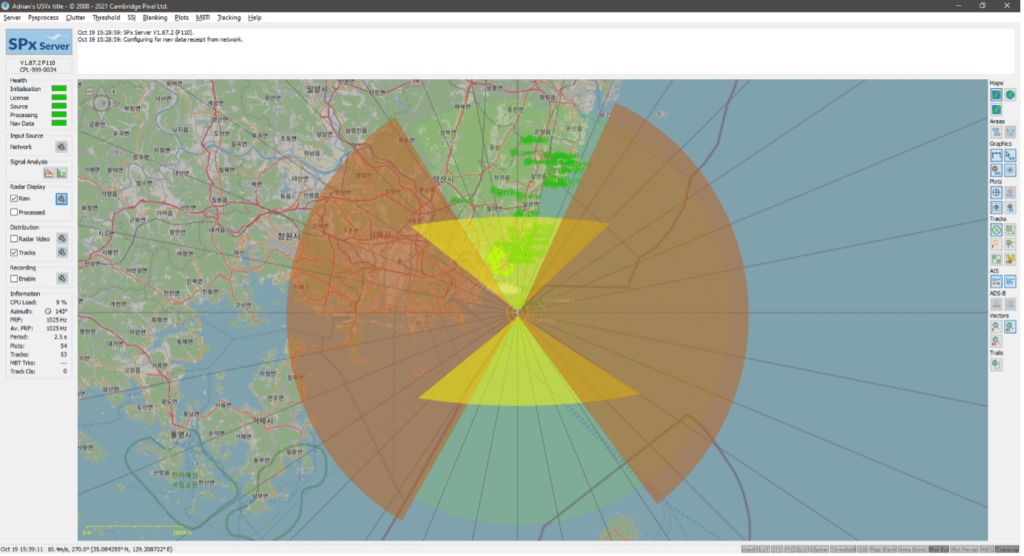
A feature of many USVs is their ability to navigate round obstacles autonomously. While the position of stationary objects such as land and buoys may be known ahead of deployment, the dynamic position of other ships and vehicles must be sensed as the USV moves. Radar is fundamental to detecting potential obstacles at significant ranges. Extracting and tracking targets from radar video is a core competence of Cambridge Pixel.
Many USV applications require the ability to send radar video, track data and camera video back from the USV to a “mothership”, via a wireless link. The link between the USV and mothership may typically be a low bandwidth microwave or satellite connection, presenting a significant challenge for reliable data sending. Cambridge Pixel has software modules that allow the best use to be made of the available bandwidth.
On the mothership, receipt and display of the data sent from the USV is a fundamental requirement. It may also be necessary to control the local processing on the USV, and possibly also the sensors themselves, remotely. Cambridge Pixel has field-proven software components that can provide each of these capabilities too.