Encontre fornecedores e fabricantes de sistemas de propulsão marítima para veículos subaquáticos não tripulados; UUV, AUV, ROV, incluindo propulsores marítimos, motores elétricos submarinos e propulsão de flutuabilidade variável
Se você projeta, constrói ou fornece Sistemas de propulsão marítima, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Propulsão subaquática para sistemas não tripulados
A forma mais comum de sistema de propulsão marítima para AUVs (veículos subaquáticos autónomos) e ROVs (veículos operados remotamente) é o propulsor marítimo. Os propulsores subaquáticos são dispositivos de propulsão que combinam uma hélice com um motor hidráulico ou elétrico. Os sistemas de propulsão hidráulica ocupam muito espaço e peso devido aos componentes extras, como válvulas e tubos, e por isso são normalmente encontrados apenas em ROVs de trabalho maiores.
Motores elétricos submarinos
Motores marítimos Nova da Plettenberg
Os propulsores subaquáticos elétricos geralmente utilizam motores síncronos DC sem escovas ou de íman permanente. Estes motores podem ser selados dentro de cavidades cheias de ar ou óleo, ou utilizar um design inundado que permite que a água entre em contacto com o motor, proporcionando refrigeração e lubrificação adicionais.
Alguns UUVs (veículos subaquáticos não tripulados) podem ter propulsores dispostos de forma a fornecer impulso vetorial, o que permite ao veículo controlar com precisão a sua direção de movimento. Os ROVs são normalmente equipados com quatro, seis ou oito propulsores ROV. São necessários pelo menos seis propulsores para proporcionar um movimento completo de seis graus de liberdade (surgimento, elevação, oscilação, rotação, inclinação e guinada).
Hélices subaquáticas
As hélices, que convertem a rotação em impulso, precisam de ser combinadas com o binário do motor para obter a máxima eficiência. Também precisam de ser fabricadas com um material resistente à corrosão, como uma liga de alumínio e aço inoxidável, uma vez que estarão constantemente submersas em água salgada.
Propulsão de flutuabilidade variável
Os planadores subaquáticos utilizam uma forma diferente de propulsão, conhecida como propulsão de flutuabilidade variável. Este método utiliza uma bexiga interna que pode ser inflada ou esvaziada para alterar a densidade do veículo, fazendo-o subir ou afundar conforme necessário. O planador utiliza hidrofólios para gerar movimento para a frente à medida que o veículo desce, com o resultado de que o padrão de movimento do planador se assemelha a um perfil em dente de serra. Devido à falta de componentes como motores, eles requerem muito pouca energia e podem operar por períodos mais longos do que muitos AUVs típicos.
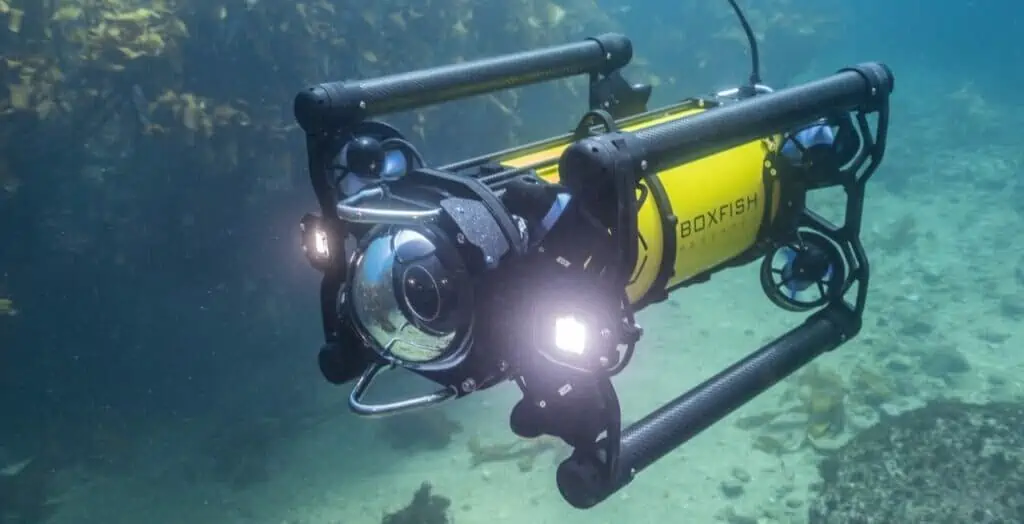
ROV Boxfish com oito propulsores marítimos vetoriais 3D