A fusão de sensores tornou-se uma pedra angular da aviónica moderna, especialmente em sistemas aéreos não tripulados (UAS). Ao integrar e processar dados de vários sensores internos e externos, a fusão de sensores melhora a consciência situacional, refina a precisão do rastreamento e permite uma automação sofisticada. Essa capacidade é particularmente crucial em aplicações onde a tomada de decisões em tempo real e a clareza dos dados são fundamentais. Com a crescente complexidade dos ambientes de voo e as crescentes exigências das missões, a fusão de sensores, particularmente a fusão multitrack, está a impulsionar a inovação nos sistemas de aviónica.
Se você projeta, constrói ou fornece Fusores de dados de aviónica, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
A fusão de sensores é o processo de integração de dados de vários sensores para formar uma visão coerente e abrangente de um ambiente ou estado do sistema. Na aviónica, isso normalmente envolve a combinação de entradas como radar, ADS-B, dados aéreos e medições inerciais para apoiar a navegação, o rastreamento e o controlo de voo.
Para plataformas não tripuladas, nas quais não há pilotos humanos a bordo para avaliar visualmente o ambiente ou interpretar várias fontes de dados, a fusão de sensores torna-se um facilitador essencial para o voo autónomo e a segurança operacional. Os dados fusionados garantem que a compreensão do veículo sobre o seu espaço aéreo seja não só precisa, mas também oportuna, o que é vital para tarefas como prevenção de colisões, planeamento de trajetória e controlo adaptativo de missões.
A necessidade da fusão multitrack
Em cenários em que vários sensores detetam o mesmo alvo, como outra aeronave, um farol de navegação ou uma característica do terreno, cada sensor gera a sua própria trajetória. Sem a fusão, essas múltiplas trajetórias para um único objeto podem resultar em informações duplicadas, sobrecarregando os operadores e os sistemas de software com ecrãs confusos e dados redundantes.
A fusão multitrack resolve isso correlacionando e consolidando detecções duplicadas em uma única trajetória contínua. Essa capacidade não é apenas vital para a clareza visual nas estações de controlo em terra e telas da cabine, mas também reduz a carga computacional nos computadores de bordo e garante que os sistemas downstream ajam com base em informações unificadas e altamente confiáveis.
Em sistemas aviônicos avançados, a fusão multitrack pode suportar a ingestão e o processamento de dados de mais de duas dúzias de canais de sensores independentes. Esses sistemas dependem de algoritmos de filtragem contínua que mantêm a integridade da trilha ao longo do tempo, refinando as estimativas de posição e velocidade à medida que novos dados chegam.
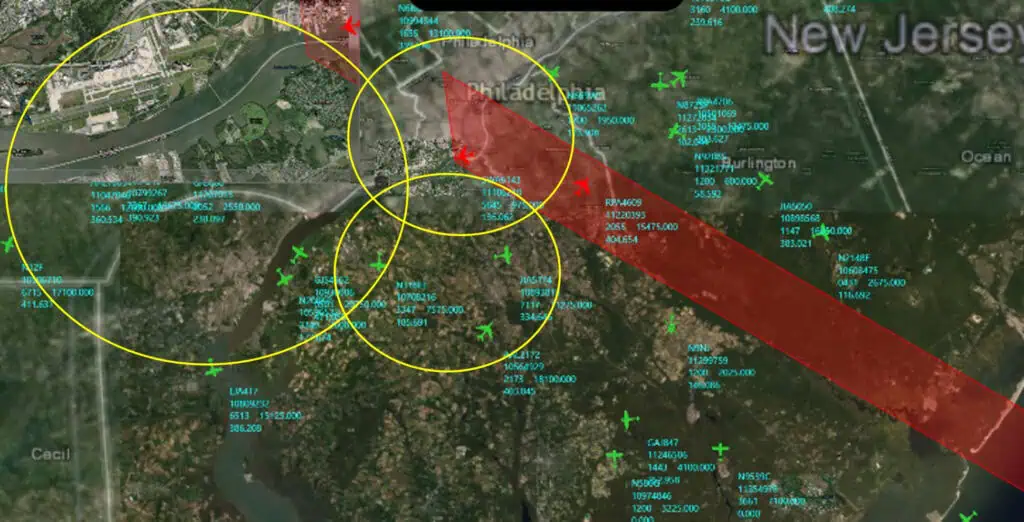
Multi-Track Fuser da Sunhillo Corporation
Subsistemas de aviónica suportados pela fusão de sensores
A fusão de sensores atua como uma camada fundamental que alimenta vários subsistemas de aviónica. As principais integrações incluem:
Sistemas de controlo de voo: A fusão de sensores permite uma dinâmica de voo estável, combinando entradas de giroscópios, acelerómetros, GPS e computadores de dados aéreos. Essas informações suportam funções como controlo de atitude, navegação e rotinas de piloto automático.
Sistemas de gestão de voo (FMS): Ao integrar dados fusionados, as plataformas FMS podem executar planos de voo com mais precisão, gerir atualizações de rotas e adaptar-se a mudanças dinâmicas no espaço aéreo.
Computadores de dados aéreos (ADCs): Embora os ADCs tradicionalmente agreguem dados de pressão e temperatura, os seus resultados fazem frequentemente parte de uma estrutura de fusão mais ampla que melhora as medições de altitude e velocidade.
Computadores de missão incorporados: Estes sistemas servem frequentemente como centros de processamento centrais, onde os dados dos sensores fusionados são interpretados para a tomada de decisões táticas ou operacionais, particularmente em cenários de vigilância, busca e salvamento ou combate.
ADS-B e fusão de dados de tráfego: os dados de vigilância dependente automática-transmissão são uma informação vital para a consciência situacional. Quando combinados com dados de radar e eletro-ópticos, reforçam a visibilidade do espaço aéreo e a avaliação de ameaças para aeronaves tripuladas e não tripuladas.
Tecnologias essenciais que permitem a fusão de sensores em drones
Várias tecnologias essenciais sustentam a fusão eficaz de sensores na aviónica:
Arquiteturas de integração de sensores: definem como os sensores comunicam com as unidades de processamento. Arquiteturas modulares baseadas em padrões oferecem flexibilidade e escalabilidade, o que é crucial para a adaptação a diferentes requisitos de missão.
Algoritmos de fusão: algoritmos para correlação de trajetórias, filtragem (como filtros de Kalman) e pontuação de confiança são essenciais para sistemas de fusão eficazes. Esses algoritmos avaliam se várias deteções se referem ao mesmo objeto, prevêem posições futuras e eliminam ruídos ou valores atípicos.
Compatibilidade de formatos de dados: os sistemas que produzem e recebem formatos padronizados garantem a interoperabilidade entre plataformas e parceiros da coligação.
Sincronização de tempo: a marcação precisa de tempo em todas as entradas dos sensores garante que os processos de fusão funcionem com dados sincronizados, o que é crucial para a resposta em tempo real e a precisão.
Benefícios da fusão de sensores na aviónica de UAVs
O uso da fusão de sensores na aviação não tripulada oferece vários benefícios importantes:
Redução da confusão na exibição: ao mesclar trilhas redundantes, os operadores e os sistemas de bordo têm uma visão mais clara e gerenciável do ambiente operacional.
Maior consciência situacional: a combinação de várias fontes de dados oferece uma compreensão mais rica da posição, do movimento e das ameaças ou obstáculos ao redor.
Maior segurança e confiabilidade: os dados fusionados melhoram a robustez das decisões de controle de voo e reduzem o risco de interpretação incorreta de anomalias ou falhas dos sensores.
Desempenho de voo otimizado: dados ambientais e posicionais precisos permitem um controle mais preciso, uma navegação mais suave e um uso mais eficiente de combustível e energia.
Escalabilidade: os sistemas de fusão avançados suportam um grande número de entradas de sensores, o que é essencial para plataformas multissensoriais que operam em ambientes complexos ou congestionados.
Fusão de sensores em diferentes plataformas de UAV
A fusão de sensores é aproveitada de maneira diferente, dependendo do tamanho, da finalidade e da altitude operacional do UAV:
UAVs táticos pequenos: frequentemente usados em defesa e vigilância, eles se beneficiam de sistemas de fusão de sensores leves que combinam entradas eletro-ópticas, infravermelhas e GPS para rastreamento e mapeamento localizados.
UAVs de média altitude e longa autonomia (MALE): Estas plataformas integram dados de radar e ADS-B mais avançados com outras entradas de aviónica para gerir missões de longo alcance, incluindo patrulha de fronteiras e ISR (inteligência, vigilância, reconhecimento) persistente.
UAVs de alta altitude: operando acima do espaço aéreo comercial, essas aeronaves contam com sistemas de fusão de sensores altamente redundantes para manter comunicações de longo alcance, realizar amostragens atmosféricas ou dar suporte ao alinhamento de links de satélite.
Mobilidade aérea urbana e entrega por drones: em ambientes densamente povoados, a fusão de sensores é crucial para navegar por obstáculos dinâmicos, aderir a corredores de voo e integrar-se à infraestrutura de cidades inteligentes.
Desafios na implementação da fusão de sensores
Apesar dos seus benefícios, a implementação da fusão de sensores em sistemas de aviónica apresenta desafios:
Carga computacional: o processamento de dados em tempo real de vários sensores requer sistemas incorporados poderosos que também devem atender a restrições rigorosas de tamanho, peso e potência (SWaP).
Calibração e alinhamento de sensores: sensores desalinhados ou mal calibrados podem introduzir erros sistemáticos que prejudicam a precisão da fusão.
Interferência ambiental: fatores como clima, terreno e interferência de sinal podem afetar a confiabilidade do sensor, tornando algoritmos de fusão robustos cruciais para mitigar erros.
Padronização e certificação: alcançar interoperabilidade e conformidade regulatória, especialmente para operações civis de UAV, requer adesão a padrões internacionais e testes rigorosos.
Olhando para o futuro: o futuro da fusão em voos não tripulados
À medida que os sistemas não tripulados continuam a evoluir, a fusão de sensores irá expandir-se para além da simples correlação de trajetórias, abrangendo análises preditivas e inteligência artificial. Os algoritmos de fusão baseados em IA poderão um dia ser capazes de antecipar a trajetória de outras aeronaves ou alterações ambientais, permitindo uma navegação proativa em vez de reativa.
Além disso, a integração de sensores espaciais, redes de comunicação 5G e recursos de computação de ponta promete aprimorar ainda mais a profundidade e a rapidez dos sistemas de fusão de sensores. Com os avanços contínuos em miniaturização e poder de processamento, mesmo os menores UAVs logo se beneficiarão da sofisticação antes reservada a aeronaves tripuladas e grandes plataformas.
A fusão de sensores está na vanguarda da inovação da aviónica moderna, proporcionando aos sistemas não tripulados a clareza, precisão e capacidade de resposta de que necessitam para operar com segurança e eficácia. Ao correlacionar dados multitrack de inúmeras fontes internas e externas, a fusão de sensores não só melhora a qualidade das informações disponíveis, como também transforma a forma como os UAV interagem com o seu ambiente.
Desde a redução da desorganização do ecrã e a garantia de um controlo de voo preciso até à interoperabilidade de dados perfeita e à execução adaptativa de missões, a fusão de sensores é indispensável para as plataformas de veículos aéreos não tripulados (UAV) atuais e da próxima geração. À medida que os céus ficam mais congestionados e as exigências operacionais aumentam, o papel das tecnologias de fusão robustas, escaláveis e inteligentes só vai crescer em importância.
A Sunhillo Corporation juntou-se à ResilienX no programa MICH-AIR BVLOS System, fornecendo a fusão de vigilância SureLine baseada na nuvem de radar e ADS-B para operações de aeronaves tripuladas e autónomas