La fusión de sensores se ha convertido en una piedra angular de la aviónica moderna, especialmente en los sistemas aéreos no tripulados (UAS). Al integrar y procesar datos de múltiples sensores a bordo y externos, la fusión de sensores mejora la conciencia situacional, refina la precisión del seguimiento y permite una automatización sofisticada. Esta capacidad es especialmente crucial en aplicaciones en las que la toma de decisiones en tiempo real y la claridad de los datos son primordiales. Con la creciente complejidad de los entornos de vuelo y las crecientes exigencias de las misiones, la fusión de sensores, en particular la fusión multitrack, está impulsando la innovación en los sistemas de aviónica.
Si diseñas, construyes o suministras Fusores de datos de aviónica, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
La fusión de sensores es el proceso de integrar datos de múltiples sensores para formar una visión coherente y completa del estado de un entorno o sistema. En aviónica, esto suele implicar la combinación de entradas como radar, ADS-B, datos aéreos y mediciones inerciales para facilitar la navegación, el seguimiento y el control del vuelo.
En el caso de las plataformas no tripuladas, en las que no hay pilotos humanos a bordo para evaluar visualmente el entorno o interpretar múltiples fuentes de datos, la fusión de sensores se convierte en un factor clave para el vuelo autónomo y la seguridad operativa. Los datos fusionados garantizan que la comprensión que tiene un vehículo de su espacio aéreo no solo sea precisa, sino también oportuna, lo cual es vital para tareas como la prevención de colisiones, la planificación de rutas y el control adaptativo de misiones.
La necesidad imperiosa de la fusión multitrack
En situaciones en las que varios sensores detectan el mismo objetivo, como otra aeronave, una baliza de navegación o una característica del terreno, cada sensor genera su propia trayectoria. Sin la fusión, estas múltiples trayectorias para un solo objeto pueden dar lugar a información duplicada, lo que abruma tanto a los operadores como a los sistemas de software con pantallas desordenadas y datos redundantes.
La fusión multitrack soluciona este problema correlacionando y consolidando las detecciones duplicadas en una única trayectoria continua. Esta capacidad no solo es vital para la claridad visual en las estaciones de control en tierra y las pantallas de la cabina, sino que también reduce la carga computacional en los ordenadores de vuelo y garantiza que los sistemas posteriores actúen sobre información unificada y de alta fiabilidad.
En los sistemas de aviónica avanzados, la fusión multitrack puede admitir la ingestión y el procesamiento de datos de más de dos docenas de canales de sensores independientes. Estos sistemas se basan en algoritmos de filtrado continuo que mantienen la integridad de la pista a lo largo del tiempo, refinando las estimaciones de posición y velocidad a medida que llegan nuevos datos.
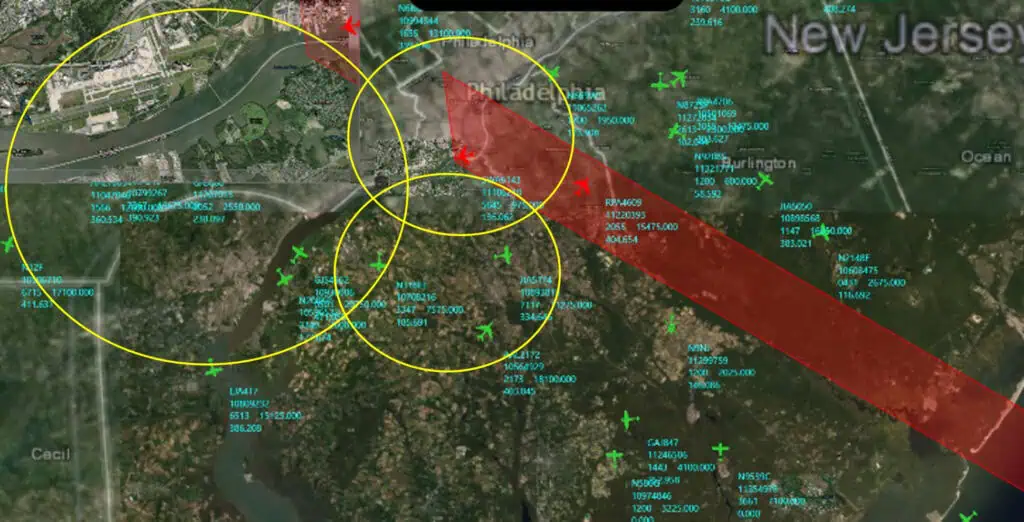
Multi-Track Fuser de Sunhillo Corporation
Subsistemas de aviónica compatibles con la fusión de sensores
La fusión de sensores actúa como una capa fundamental que alimenta numerosos subsistemas de aviónica. Entre las integraciones clave se incluyen:
Sistemas de control de vuelo: la fusión de sensores permite una dinámica de vuelo estable al combinar las entradas de giroscopios, acelerómetros, GPS y ordenadores de datos aéreos. Esta información respalda funciones como el control de actitud, la navegación y las rutinas del piloto automático.
Sistemas de gestión de vuelo (FMS): al integrar los datos fusionados, las plataformas FMS pueden ejecutar con mayor precisión los planes de vuelo, gestionar las actualizaciones de rutas y adaptarse a los cambios dinámicos del espacio aéreo.
Ordenadores de datos aéreos (ADC): aunque los ADC suelen agregar datos de presión y temperatura, sus resultados suelen formar parte de un marco de fusión más amplio que mejora las mediciones de altitud y velocidad.
Ordenadores de misión integrados: Estos sistemas suelen servir como centros de procesamiento centrales, donde se interpretan los datos fusionados de los sensores para la toma de decisiones tácticas u operativas, especialmente en escenarios de vigilancia, búsqueda y rescate o combate.
Fusión de datos ADS-B y de tráfico: los datos de vigilancia dependiente automática-difusión son una aportación vital para el conocimiento de la situación. Cuando se fusionan con datos de radar y electroópticos, refuerzan la visibilidad del espacio aéreo y la evaluación de amenazas tanto para aeronaves tripuladas como no tripuladas.
Tecnologías básicas que permiten la fusión de sensores de drones
Varias tecnologías básicas sustentan la fusión eficaz de sensores en la aviónica:
Arquitecturas de integración de sensores: definen cómo se comunican los sensores con las unidades de procesamiento. Las arquitecturas modulares basadas en estándares admiten flexibilidad y escalabilidad, lo cual es crucial para adaptarse a los diferentes requisitos de las misiones.
Algoritmos de fusión: los algoritmos para la correlación de pistas, el filtrado (como los filtros de Kalman) y la puntuación de confianza son el núcleo de los sistemas de fusión eficaces. Estos algoritmos evalúan si múltiples detecciones se refieren al mismo objeto, predicen posiciones futuras y eliminan el ruido o los valores atípicos.
Compatibilidad de formatos de datos: los sistemas que generan e ingestan formatos estandarizados garantizan la interoperabilidad entre plataformas y socios de la coalición.
Sincronización temporal: el sellado de tiempo preciso en todas las entradas de los sensores garantiza que los procesos de fusión funcionen con datos sincronizados, lo cual es crucial para la respuesta en tiempo real y la precisión.
Ventajas de la fusión de sensores en la aviónica de los UAV
El uso de la fusión de sensores en la aviación no tripulada ofrece varias ventajas clave:
Reducción del desorden en la pantalla: al fusionar las pistas redundantes, los operadores y los sistemas a bordo obtienen una visión más clara y manejable del entorno operativo.
Mejora de la conciencia situacional: la combinación de múltiples fuentes de datos ofrece una comprensión más rica de la posición, el movimiento y las amenazas u obstáculos circundantes.
Mayor seguridad y fiabilidad: los datos fusionados mejoran la solidez de las decisiones de control de vuelo y reducen el riesgo de malinterpretar las anomalías o fallos de los sensores.
Rendimiento de vuelo optimizado: los datos precisos sobre el entorno y la posición permiten un control más preciso, una navegación más fluida y un uso más eficiente del combustible y la energía.
Escalabilidad: los sistemas de fusión avanzados admiten un gran número de entradas de sensores, lo que es esencial para las plataformas multisensor que operan en entornos complejos o congestionados.
Fusión de sensores en diferentes plataformas de UAV
La fusión de sensores se aprovecha de forma diferente en función del tamaño, la finalidad y la altitud operativa del UAV:
UAV tácticos pequeños: a menudo utilizados en defensa y vigilancia, se benefician de sistemas de fusión de sensores ligeros que combinan entradas electroópticas, infrarrojas y GPS para el seguimiento y la cartografía localizados.
UAV de altitud media y larga autonomía (MALE): estas plataformas integran datos de radar y ADS-B más avanzados con otras entradas de aviónica para gestionar misiones de largo alcance, como la patrulla fronteriza y el ISR (inteligencia, vigilancia y reconocimiento) persistente.
UAV de gran altitud: estas aeronaves, que operan por encima del espacio aéreo comercial, dependen de sistemas de fusión de sensores altamente redundantes para mantener comunicaciones de largo alcance, realizar muestreos atmosféricos o apoyar la alineación de enlaces satelitales.
Movilidad aérea urbana y entrega con drones: en entornos densamente poblados, la fusión de sensores es crucial para sortear obstáculos dinámicos, respetar los corredores de vuelo e integrarse en la infraestructura de las ciudades inteligentes.
Retos en la implementación de la fusión de sensores
A pesar de sus ventajas, la implementación de la fusión de sensores en los sistemas de aviónica plantea algunos retos:
Carga computacional: el procesamiento de datos en tiempo real procedentes de numerosos sensores requiere potentes sistemas integrados que también deben cumplir estrictas restricciones de tamaño, peso y potencia (SWaP).
Calibración y alineación de sensores: los sensores desalineados o mal calibrados pueden introducir errores sistemáticos que degradan la precisión de la fusión.
Interferencias ambientales: factores como el clima, el terreno y las interferencias de señal pueden afectar a la fiabilidad de los sensores, por lo que es fundamental contar con algoritmos de fusión robustos para mitigar los errores.
Estandarización y certificación: para lograr la interoperabilidad y el cumplimiento de la normativa, especialmente en el caso de las operaciones civiles con UAV, es necesario cumplir las normas internacionales y realizar pruebas rigurosas.
Mirando hacia el futuro: el futuro de la fusión en los vuelos no tripulados
A medida que los sistemas no tripulados continúan evolucionando, la fusión de sensores se expandirá más allá de la simple correlación de trayectorias para abarcar el análisis predictivo y la inteligencia artificial. Es posible que algún día los algoritmos de fusión impulsados por la IA sean capaces de anticipar la trayectoria de otras aeronaves o los cambios ambientales, lo que permitiría una navegación proactiva en lugar de reactiva.
Además, la integración de sensores espaciales, redes de comunicación 5G y capacidades de computación periférica promete mejorar aún más la profundidad y la inmediatez de los sistemas de fusión de sensores. Con los continuos avances en miniaturización y potencia de procesamiento, incluso los UAV más pequeños pronto se beneficiarán de la sofisticación que antes estaba reservada a las aeronaves tripuladas y las grandes plataformas.
La fusión de sensores se encuentra a la vanguardia de la innovación en aviónica moderna, ya que proporciona a los sistemas no tripulados la claridad, la precisión y la capacidad de respuesta que necesitan para operar de forma segura y eficaz. Al correlacionar datos multitrack procedentes de numerosas fuentes internas y externas, la fusión de sensores no solo mejora la calidad de la información disponible, sino que también transforma la forma en que los UAV interactúan con su entorno.
Desde la reducción del desorden en la pantalla y la garantía de un control de vuelo preciso hasta la interoperabilidad perfecta de los datos y la ejecución adaptativa de las misiones, la fusión de sensores es indispensable tanto para las plataformas de vehículos aéreos no tripulados (UAV) actuales como para las de próxima generación. A medida que los cielos se vuelven más concurridos y aumentan las exigencias operativas, la importancia de las tecnologías de fusión robustas, escalables e inteligentes no hará más que crecer.
Sunhillo Corporation se ha unido a ResilienX en el programa MICH-AIR BVLOS System, que ofrece la fusión de vigilancia SureLine basada en la nube de radar y ADS-B para operaciones de aeronaves tripuladas y autónomas