Fusion des données et des capteurs pour l'avionique
La fusion des capteurs est devenue la pierre angulaire de l'avionique moderne, en particulier dans les systèmes aériens sans pilote (UAS). En intégrant et en traitant les données provenant de multiples capteurs embarqués et externes, la fusion des capteurs améliore la connaissance de la situation, affine la précision du suivi et permet une automatisation sophistiquée. Cette capacité est particulièrement cruciale dans les applications où la prise de décision en temps réel et la clarté des données sont primordiales. Avec la complexité croissante des environnements de vol et les exigences de plus en plus élevées des missions, la fusion des capteurs, en particulier la fusion multitrack, stimule l'innovation dans les systèmes avioniques.
Si vous concevez, construisez ou fournissez Fuseurs de données avioniques, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Fusion des données et des capteurs pour l'avionique
Vue d'ensemble par
Summer James
Mise à jour:
La fusion de capteurs est le processus qui consiste à intégrer les données provenant de plusieurs capteurs afin d’obtenir une vue cohérente et complète de l’état d’un environnement ou d’un système. En avionique, cela implique généralement de combiner des données provenant de sources telles que le radar, l’ADS-B, les données aérodynamiques, et les données de vol. données aérodynamiques et mesures inertielles pour faciliter la navigation, le suivi et le contrôle du vol.
Pour les plateformes sans pilote, où aucun pilote humain n’est présent à bord pour évaluer visuellement l’environnement ou interpréter plusieurs sources de données, la fusion des capteurs devient un élément clé pour le vol autonome et la sécurité opérationnelle. Les données fusionnées garantissent que la compréhension qu’a un véhicule de son espace aérien est non seulement précise, mais aussi opportune, ce qui est essentiel pour des tâches telles que l’évitement des collisions, la planification de trajectoire et le contrôle adaptatif des missions.
La nécessité de la fusion multitrack
Dans les scénarios où plusieurs capteurs détectent la même cible, comme un autre aéronef, une balise de navigation ou une caractéristique du terrain, chaque capteur génère sa propre trajectoire. Sans fusion, ces multiples trajectoires pour un seul objet peuvent entraîner une duplication des informations, submergeant les opérateurs et les systèmes logiciels avec des affichages encombrés et des données redondantes.
La fusion multitrack résout ce problème en corrélant et en consolidant les détections dupliquées en une seule trajectoire continue. Cette capacité est non seulement essentielle pour la clarté visuelle dans les stations de contrôle au sol et les écrans du cockpit, mais elle réduit également la charge de calcul des ordinateurs de bord et garantit que les systèmes en aval agissent sur la base d’informations unifiées et hautement fiables.
Dans les systèmes avioniques avancés, la fusion multitrack peut prendre en charge l’ingestion et le traitement des données provenant de plus d’une vingtaine de canaux de capteurs indépendants. Ces systèmes s’appuient sur des algorithmes de filtrage continu qui maintiennent l’intégrité des traces au fil du temps, affinant les estimations de position et de vitesse à mesure que de nouvelles données arrivent.
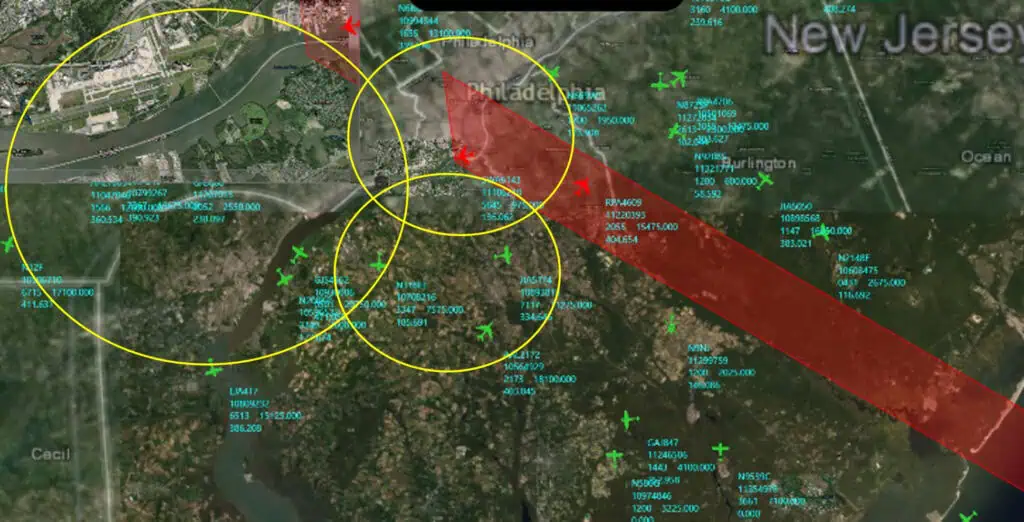
Multi-Track Fuser par Sunhillo Corporation
Sous-systèmes avioniques pris en charge par la fusion de capteurs
La fusion de capteurs constitue une couche fondamentale qui alimente de nombreux sous-systèmes avioniques. Les principales intégrations comprennent :
Systèmes de contrôle de vol : la fusion des capteurs permet une dynamique de vol stable en combinant les données provenant des gyroscopes, des accéléromètres, du GPS et des calculateurs de données aérodynamiques. Ces informations prennent en charge des fonctions telles que le contrôle d’attitude, la navigation et les routines du pilote automatique.
Systèmes de gestion de vol (FMS) : en intégrant les données fusionnées, les plateformes FMS peuvent exécuter plus précisément les plans de vol, gérer les mises à jour d’itinéraires et s’adapter aux changements dynamiques de l’espace aérien.
Ordinateurs de données aérodynamiques (ADC) : bien que les ADC agrègent traditionnellement les données de pression et de température, leurs résultats font souvent partie d’un cadre de fusion plus large qui améliore les mesures d’altitude et de vitesse.
Ordinateurs de mission embarqués : ces systèmes servent souvent de centres de traitement centraux, où les données fusionnées des capteurs sont interprétées pour la prise de décisions tactiques ou opérationnelles, en particulier dans les scénarios de surveillance, de recherche et de sauvetage ou de combat.
Fusion des données ADS-B et de trafic : les données de surveillance dépendante automatique en mode diffusion sont essentielles pour la connaissance de la situation. Lorsqu’elles sont fusionnées avec les données radar et électro-optiques, elles renforcent la visibilité de l’espace aérien et l’évaluation des menaces pour les aéronefs avec ou sans équipage.
Technologies de base permettant la fusion des capteurs des drones
Plusieurs technologies de base sous-tendent la fusion efficace des capteurs dans l’avionique :
Architectures d’intégration des capteurs : elles définissent la manière dont les capteurs communiquent avec les unités de traitement. Les architectures modulaires basées sur des normes favorisent la flexibilité et l’évolutivité, qui sont essentielles pour s’adapter aux différentes exigences des missions.
Algorithmes de fusion : les algorithmes de corrélation des trajectoires, de filtrage (tels que les filtres de Kalman) et d’évaluation de la confiance sont au cœur des systèmes de fusion efficaces. Ces algorithmes évaluent si plusieurs détections se réfèrent au même objet, prédisent les positions futures et éliminent le bruit ou les valeurs aberrantes.
Compatibilité des formats de données : les systèmes qui produisent et ingèrent des formats standardisés garantissent l’interopérabilité entre les plateformes et les partenaires de la coalition.
Synchronisation temporelle : l’horodatage précis de toutes les entrées des capteurs garantit que les processus de fusion fonctionnent avec des données synchronisées, ce qui est essentiel pour la réactivité et la précision en temps réel.
Avantages de la fusion des capteurs dans l’avionique des drones
L’utilisation de la fusion de capteurs dans l’aviation sans pilote offre plusieurs avantages clés :
Réduction de l’encombrement de l’affichage : en fusionnant les traces redondantes, les opérateurs et les systèmes embarqués bénéficient d’une vue plus claire et plus facile à gérer de l’environnement opérationnel.
Meilleure connaissance de la situation : la combinaison de plusieurs sources de données offre une compréhension plus riche de la position, des mouvements et des menaces ou obstacles environnants.
Sécurité et fiabilité accrues : les données fusionnées améliorent la robustesse des décisions de contrôle de vol et réduisent le risque d’interprétation erronée des anomalies ou des défaillances des capteurs.
Performances de vol optimisées : des données environnementales et de position précises permettent un contrôle plus précis, une navigation plus fluide et une utilisation plus efficace du carburant et de l’énergie.
Évolutivité : les systèmes de fusion avancés prennent en charge un grand nombre d’entrées de capteurs, ce qui est essentiel pour les plateformes multicapteurs opérant dans des environnements complexes ou encombrés.
Fusion des capteurs dans différentes plateformes de drones
La fusion des capteurs est exploitée différemment en fonction de la taille, de l’objectif et de l’altitude opérationnelle du drone :
Petits drones tactiques : souvent utilisés dans le domaine de la défense et de la surveillance, ils bénéficient de systèmes de fusion de capteurs légers qui combinent des entrées électro-optiques, infrarouges et GPS pour le suivi et la cartographie localisés.
Drones de moyenne altitude et longue endurance (MALE) : ces plateformes intègrent des données radar et ADS-B plus avancées à d’autres données avioniques pour gérer des missions à longue portée, notamment la surveillance des frontières et les missions ISR (renseignement, surveillance, reconnaissance) persistantes.
Drones à haute altitude : opérant au-dessus de l’espace aérien commercial, ces appareils s’appuient sur des systèmes de fusion de capteurs hautement redondants pour maintenir des communications à longue portée, effectuer des prélèvements atmosphériques ou prendre en charge l’alignement des liaisons satellitaires.
Mobilité aérienne urbaine et livraison par drone : dans les environnements densément peuplés, la fusion des capteurs est essentielle pour naviguer entre les obstacles dynamiques, respecter les couloirs de vol et s’intégrer à l’infrastructure des villes intelligentes.
Défis liés à la mise en œuvre de la fusion des capteurs
Malgré ses avantages, la mise en œuvre de la fusion des capteurs dans les systèmes avioniques présente des défis :
Charge de calcul : le traitement en temps réel des données provenant de nombreux capteurs nécessite des systèmes embarqués puissants qui doivent également répondre à des contraintes strictes en matière de taille, de poids et de puissance (SWaP).
Étalonnage et alignement des capteurs : des capteurs mal alignés ou mal étalonnés peuvent introduire des erreurs systématiques qui nuisent à la précision de la fusion.
Interférences environnementales : des facteurs tels que les conditions météorologiques, le terrain et les interférences de signaux peuvent avoir un impact sur la fiabilité des capteurs, rendant indispensables des algorithmes de fusion robustes pour atténuer les erreurs.
Normalisation et certification : pour garantir l’interopérabilité et la conformité réglementaire, en particulier pour les opérations civiles de drones, il est nécessaire de respecter les normes internationales et de procéder à des tests rigoureux.
Perspectives d’avenir : l’avenir de la fusion dans le domaine des vols sans pilote
À mesure que les systèmes sans pilote continuent d’évoluer, la fusion des capteurs ira au-delà de la simple corrélation des trajectoires pour englober l’analyse prédictive et l’intelligence artificielle. Les algorithmes de fusion basés sur l’IA pourraient un jour être capables d’anticiper la trajectoire d’autres aéronefs ou les changements environnementaux, permettant ainsi une navigation proactive plutôt que réactive.
De plus, l’intégration de capteurs spatiaux, de réseaux de communication 5G et de capacités de calcul en périphérie promet d’améliorer encore la profondeur et l’instantanéité des systèmes de fusion des capteurs. Grâce aux progrès continus en matière de miniaturisation et de puissance de traitement, même les plus petits drones bénéficieront bientôt d’une sophistication auparavant réservée aux avions pilotés et aux grandes plateformes.
La fusion des capteurs est à la pointe de l’innovation avionique moderne, offrant aux systèmes sans pilote la clarté, la précision et la réactivité dont ils ont besoin pour fonctionner de manière sûre et efficace. En corrélant les données multitrack provenant de nombreuses sources embarquées et externes, la fusion des capteurs améliore non seulement la qualité des informations disponibles, mais transforme également la manière dont les drones interagissent avec leur environnement.
Qu’il s’agisse de réduire l’encombrement de l’affichage, d’assurer un contrôle précis du vol, de permettre une interopérabilité transparente des données ou d’adapter l’exécution des missions, la fusion des capteurs est indispensable pour les plateformes de véhicules aériens sans pilote (UAV) actuelles et de nouvelle génération. À mesure que le ciel devient plus encombré et que les exigences opérationnelles augmentent, le rôle des technologies de fusion robustes, évolutives et intelligentes ne fera que gagner en importance.
Sunhillo Corporation a rejoint ResilienX dans le cadre du programme MICH-AIR BVLOS System, fournissant une surveillance SureLine basée sur la fusion du radar et de l'ADS-B pour les opérations d'aéronefs avec équipage et autonomes