Fuzja czujników stała się podstawą nowoczesnej awioniki, zwłaszcza w bezzałogowych systemach powietrznych (UAS). Dzięki integracji i przetwarzaniu danych z wielu czujników pokładowych i zewnętrznych fuzja czujników poprawia świadomość sytuacyjną, zwiększa precyzję śledzenia i umożliwia zaawansowaną automatyzację. Ta funkcja ma szczególne znaczenie w zastosowaniach, w których najważniejsze są podejmowanie decyzji w czasie rzeczywistym i przejrzystość danych. Wraz z rosnącą złożonością środowisk lotniczych i rosnącymi wymaganiami misji, fuzja czujników, a zwłaszcza fuzja wielościeżkowa, napędza innowacje w systemach awioniki.
Jeśli projektujesz, budujesz lub dostarczasz Fuzje danych awioniki, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Fuzja czujników to proces integracji danych z wielu czujników w celu uzyskania spójnego i kompleksowego obrazu środowiska lub stanu systemu. W awionice zazwyczaj polega to na połączeniu danych wejściowych z takich źródeł, jak radar, ADS-B, danych lotniczych oraz pomiarów inercyjnych w celu wsparcia nawigacji, śledzenia i kontroli lotu.
W przypadku platform bezzałogowych, gdzie nie ma pilotów oceniających wizualnie otoczenie lub interpretujących wiele źródeł danych, fuzja czujników staje się kluczowym czynnikiem umożliwiającym autonomiczny lot i bezpieczeństwo operacyjne. Połączone dane zapewniają, że pojazd nie tylko dokładnie, ale także na czas rozpoznaje przestrzeń powietrzną, co ma kluczowe znaczenie dla zadań takich jak unikanie kolizji, planowanie trasy i adaptacyjne sterowanie misją.
Konieczność fuzji wielościeżkowej
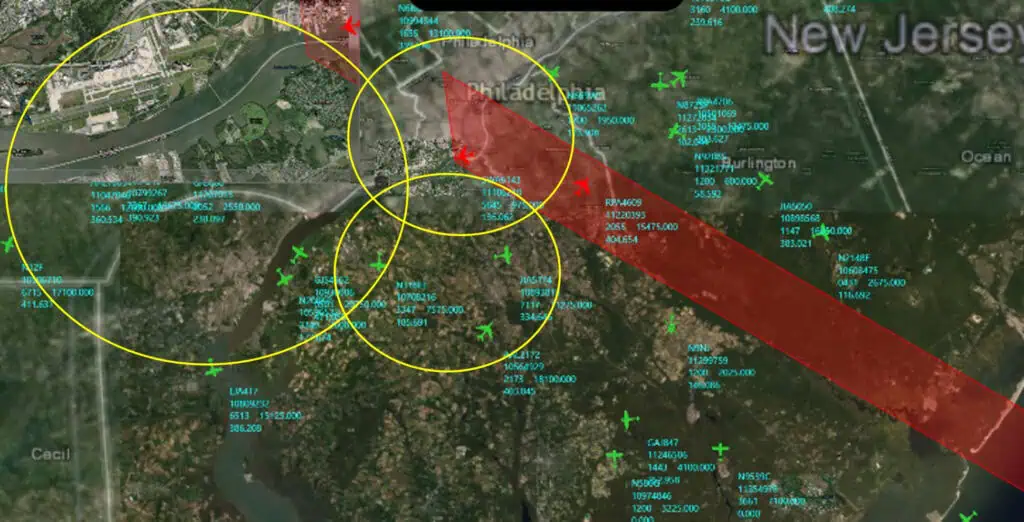
W scenariuszach, w których wiele czujników wykrywa ten sam cel, taki jak inny statek powietrzny, sygnał nawigacyjny lub element terenu, każdy czujnik generuje własną ścieżkę. Bez fuzji te wielokrotne ścieżki dla jednego obiektu mogą powodować powielanie informacji, przytłaczając operatorów i systemy oprogramowania nieuporządkowanymi wyświetlaczami i zbędnymi danymi.
Fuzja wielościeżkowa rozwiązuje ten problem poprzez korelację i konsolidację zduplikowanych wykryć w jeden ciągły ślad. Ta funkcja jest nie tylko niezbędna dla zapewnienia przejrzystości obrazu w naziemnych stacjach kontroli i na wyświetlaczach w kokpicie, ale także zmniejsza obciążenie obliczeniowe komputerów pokładowych i zapewnia, że systemy niższego szczebla działają w oparciu o ujednolicone, wiarygodne informacje.
W zaawansowanych systemach awioniki fuzja wielościeżkowa może wspierać pozyskiwanie i przetwarzanie danych z ponad dwudziestu niezależnych kanałów czujników. Systemy te opierają się na algorytmach ciągłego filtrowania, które utrzymują integralność ścieżki w czasie, udoskonalając szacunki pozycji i prędkości w miarę napływania nowych danych.
Multi-Track Fuser firmy Sunhillo Corporation
Podsystemy awioniki obsługiwane przez fuzję czujników
Fuzja czujników stanowi podstawową warstwę, która zasila liczne podsystemy awioniki. Kluczowe integracje obejmują:
Systemy kontroli lotu: Fuzja czujników umożliwia stabilną dynamikę lotu poprzez połączenie danych z żyroskopów, akcelerometrów, GPS i komputerów pokładowych. Informacje te wspierają takie funkcje, jak kontrola położenia, nawigacja i procedury autopilota.
Systemy zarządzania lotem (FMS): Dzięki integracji połączonych danych platformy FMS mogą dokładniej realizować plany lotu, zarządzać aktualizacjami tras i dostosowywać się do dynamicznych zmian w przestrzeni powietrznej.
Komputery danych lotniczych (ADC): Chociaż komputery ADC tradycyjnie agregują dane dotyczące ciśnienia i temperatury, ich wyniki są często częścią szerszej struktury fuzji, która poprawia pomiary wysokości i prędkości.
Wbudowane komputery misji: Systemy te często służą jako centralne centra przetwarzania danych, w których połączone dane z czujników są interpretowane na potrzeby podejmowania decyzji taktycznych lub operacyjnych, szczególnie w scenariuszach związanych z nadzorem, poszukiwaniem i ratownictwem lub walką.
ADS-B i fuzja danych o ruchu lotniczym: Dane z automatycznego nadzoru zależnego (ADS-B) są niezbędnym źródłem informacji dla oceny sytuacji. W połączeniu z danymi radarowymi i elektrooptycznymi zwiększają one widoczność przestrzeni powietrznej i poprawiają ocenę zagrożeń zarówno dla samolotów załogowych, jak i bezzałogowych.
Podstawowe technologie umożliwiające fuzję czujników dronów
Skuteczną fuzję czujników w awionice wspiera kilka podstawowych technologii:
Architektury integracji czujników: określają one sposób komunikacji czujników z jednostkami przetwarzającymi. Modułowe, oparte na standardach architektury zapewniają elastyczność i skalowalność, które mają kluczowe znaczenie dla dostosowania się do różnych wymagań misji.
Algorytmy fuzji: algorytmy korelacji śladów, filtrowania (takie jak filtry Kalmana) i oceny pewności stanowią podstawę skutecznych systemów fuzji. Algorytmy te oceniają, czy wiele wykryć odnosi się do tego samego obiektu, przewidują przyszłe pozycje i eliminują szumy lub wartości odstające.
Kompatybilność formatów danych: systemy, które generują i przetwarzają standardowe formaty, zapewniają interoperacyjność między platformami i partnerami koalicyjnymi.
Synchronizacja czasu: dokładne oznaczanie czasu we wszystkich danych wejściowych z czujników zapewnia, że procesy fuzji działają w oparciu o zsynchronizowane dane, co ma kluczowe znaczenie dla reakcji w czasie rzeczywistym i dokładności.
Korzyści płynące z fuzji czujników w awionice bezzałogowych statków powietrznych
Zastosowanie fuzji czujników w lotnictwie bezzałogowym zapewnia kilka kluczowych korzyści:
Zmniejszenie zagracenia wyświetlacza: dzięki połączeniu zbędnych śladów operatorzy i systemy pokładowe mają bardziej przejrzysty i łatwiejszy do zarządzania obraz środowiska operacyjnego.
Lepsza orientacja sytuacyjna: połączenie wielu źródeł danych zapewnia lepsze zrozumienie pozycji, ruchu oraz otaczających zagrożeń lub przeszkód.
Zwiększone bezpieczeństwo i niezawodność: połączone dane poprawiają solidność decyzji dotyczących kontroli lotu i zmniejszają ryzyko błędnej interpretacji anomalii lub usterek czujników.
Zoptymalizowane osiągi lotu: dokładne dane dotyczące środowiska i pozycji pozwalają na bardziej precyzyjną kontrolę, płynniejszą nawigację oraz bardziej efektywne wykorzystanie paliwa i mocy.
Skalowalność: zaawansowane systemy łączenia danych obsługują dużą liczbę danych z czujników, co jest niezbędne w przypadku platform wieloczujnikowych działających w złożonych lub zatłoczonych środowiskach.
Łączenie danych z czujników w różnych platformach bezzałogowych statków powietrznych (UAV)
Łączenie danych z czujników jest wykorzystywane w różny sposób w zależności od wielkości, przeznaczenia i wysokości operacyjnej bezzałogowego statku powietrznego (UAV):
Małe taktyczne bezzałogowe statki powietrzne: często wykorzystywane w obronności i nadzorze, korzystają z lekkich systemów fuzji czujników, które łączą dane elektrooptyczne, podczerwone i GPS w celu lokalnego śledzenia i mapowania.
UAV średniej wysokości i długiego zasięgu (MALE): platformy te integrują bardziej zaawansowane dane radarowe i ADS-B z innymi danymi awioniki w celu zarządzania misjami dalekiego zasięgu, w tym patrolowaniem granic i ciągłym ISR (wywiad, nadzór, rozpoznanie).
Bezzałogowe statki powietrzne wysokiego pułapu: działające powyżej komercyjnej przestrzeni powietrznej, statki te wykorzystują wysoce redundantne systemy fuzji czujników do utrzymywania łączności dalekiego zasięgu, pobierania próbek atmosferycznych lub wspierania wyrównywania łączy satelitarnych.
Mobilność powietrzna w miastach i dostawy dronami: W gęsto zaludnionych środowiskach fuzja czujników ma kluczowe znaczenie dla omijania dynamicznych przeszkód, przestrzegania korytarzy lotniczych i integracji z infrastrukturą inteligentnego miasta.
Wyzwania związane z wdrażaniem fuzji czujników
Pomimo swoich zalet, wdrożenie fuzji czujników w systemach awioniki wiąże się z pewnymi wyzwaniami:
Obciążenie obliczeniowe: przetwarzanie danych w czasie rzeczywistym z wielu czujników wymaga wydajnych systemów wbudowanych, które muszą również spełniać rygorystyczne ograniczenia dotyczące rozmiaru, wagi i mocy (SWaP).
Kalibracja i wyrównanie czujników: źle wyrównane lub źle skalibrowane czujniki mogą powodować systematyczne błędy, które obniżają dokładność fuzji.
Zakłócenia środowiskowe: czynniki takie jak pogoda, ukształtowanie terenu i zakłócenia sygnału mogą wpływać na niezawodność czujników, dlatego też solidne algorytmy fuzji mają kluczowe znaczenie dla ograniczenia błędów.
Standaryzacja i certyfikacja: osiągnięcie interoperacyjności i zgodności z przepisami, zwłaszcza w przypadku cywilnych operacji bezzałogowych statków powietrznych, wymaga przestrzegania międzynarodowych norm i rygorystycznych testów.
Perspektywy na przyszłość: przyszłość fuzji w lotnictwie bezzałogowym
Wraz z rozwojem systemów bezzałogowych fuzja czujników wykroczy poza proste korelowanie śladów, obejmując analitykę predykcyjną i sztuczną inteligencję. Algorytmy fuzji oparte na sztucznej inteligencji mogą pewnego dnia być w stanie przewidywać trajektorię innych statków powietrznych lub zmiany środowiskowe, umożliwiając proaktywną, a nie reaktywną nawigację.
Ponadto integracja czujników kosmicznych, sieci komunikacyjnych 5G i możliwości przetwarzania brzegowego zapowiada dalsze zwiększenie głębokości i natychmiastowości systemów fuzji czujników. Dzięki ciągłym postępom w miniaturyzacji i mocy obliczeniowej nawet najmniejsze bezzałogowe statki powietrzne wkrótce będą korzystać z zaawansowanych rozwiązań, które dotychczas były zarezerwowane dla załogowych statków powietrznych i dużych platform.
Fuzja czujników znajduje się w czołówce nowoczesnych innowacji w dziedzinie awioniki, zapewniając systemom bezzałogowym klarowność, precyzję i szybkość reakcji niezbędne do bezpiecznego i skutecznego działania. Dzięki korelacji danych z wielu źródeł pokładowych i zewnętrznych fuzja czujników nie tylko poprawia jakość dostępnych informacji, ale także zmienia sposób interakcji bezzałogowych statków powietrznych z otoczeniem.
Od zmniejszenia zagracenia wyświetlacza i zapewnienia dokładnego sterowania lotem po umożliwienie płynnej interoperacyjności danych i adaptacyjnego wykonywania misji — fuzja czujników jest niezbędna zarówno dla obecnych, jak i przyszłych platform bezzałogowych statków powietrznych (UAV). W miarę jak przestrzeń powietrzna staje się coraz bardziej zatłoczona, a wymagania operacyjne rosną, rola solidnych, skalowalnych i inteligentnych technologii fuzji będzie tylko zyskiwać na znaczeniu.
Sunhillo Corporation dołączyła do ResilienX w programie MICH-AIR BVLOS System, dostarczając opartą na chmurze fuzję radaru i ADS-B dla operacji załogowych i autonomicznych samolotów