Individuare fornitori e produttori di sistemi di propulsione marina per veicoli subacquei senza equipaggio; UUV, AUV, ROV, inclusi propulsori marini, motori elettrici sottomarini e propulsione a galleggiabilità variabile
Se progettate, costruite o fornite Sistemi di propulsione marina, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Propulsione subacquea per sistemi senza pilota
La forma più comune di sistema di propulsione marina per AUV (veicoli subacquei autonomi) e ROV (veicoli telecomandati) è il propulsore marino. I propulsori subacquei sono dispositivi di propulsione che combinano un’elica con un motore idraulico o elettrico. I sistemi di propulsione idraulica occupano molto spazio e hanno un peso elevato a causa dei componenti aggiuntivi come valvole e tubi, quindi di solito si trovano solo sui ROV di classe lavorativa più grandi.
Motori elettrici sottomarini
Motori marini Nova di Plettenberg
I propulsori elettrici subacquei utilizzano solitamente motori sincroni brushless DC o a magneti permanenti. Questi motori possono essere sigillati all’interno di cavità riempite d’aria o d’olio, oppure utilizzare un design allagato che consente all’acqua di entrare in contatto con il motore, fornendo un raffreddamento e una lubrificazione supplementari.
Alcuni UUV (veicoli subacquei senza equipaggio) possono avere propulsori disposti in modo tale da fornire una spinta vettoriale, che consente al veicolo di controllare con precisione la sua direzione di movimento. I ROV sono comunemente dotati di quattro, sei o otto propulsori ROV. Sono necessari almeno sei propulsori per fornire un movimento completo a sei gradi di libertà (oscillazione, sollevamento, rollio, beccheggio e imbardata).
Eliche subacquee
Le eliche, che convertono la rotazione in spinta, devono essere abbinate alla coppia del motore per ottenere la massima efficienza. Devono inoltre essere realizzate con un materiale resistente alla corrosione, come una lega di alluminio e acciaio inossidabile, poiché saranno costantemente immerse in acqua salata.
Propulsione a galleggiabilità variabile
Gli alianti subacquei utilizzano una forma diversa di propulsione nota come propulsione a galleggiabilità variabile. Questo metodo utilizza una camera d’aria interna che può essere gonfiata o sgonfiata per modificare la densità del veicolo, facendolo salire o scendere a seconda delle necessità. L’aliante utilizza idrofoili per generare il movimento in avanti mentre il veicolo scende, con il risultato che il modello di movimento dell’aliante assomiglia a un profilo a dente di sega. Grazie all’assenza di componenti come i motori, richiedono pochissima energia e possono funzionare per periodi più lunghi rispetto a molti AUV tradizionali.
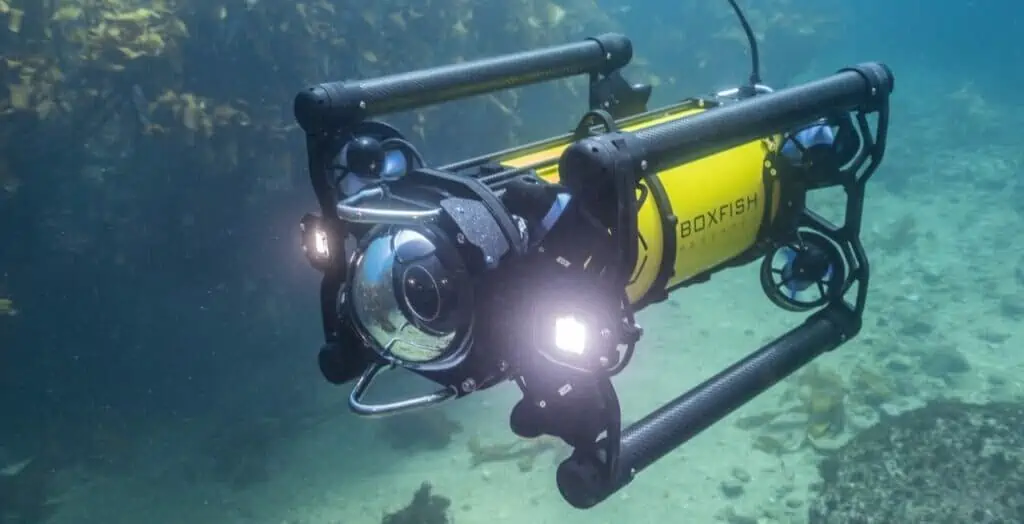
ROV Boxfish con otto propulsori marini vettoriali 3D