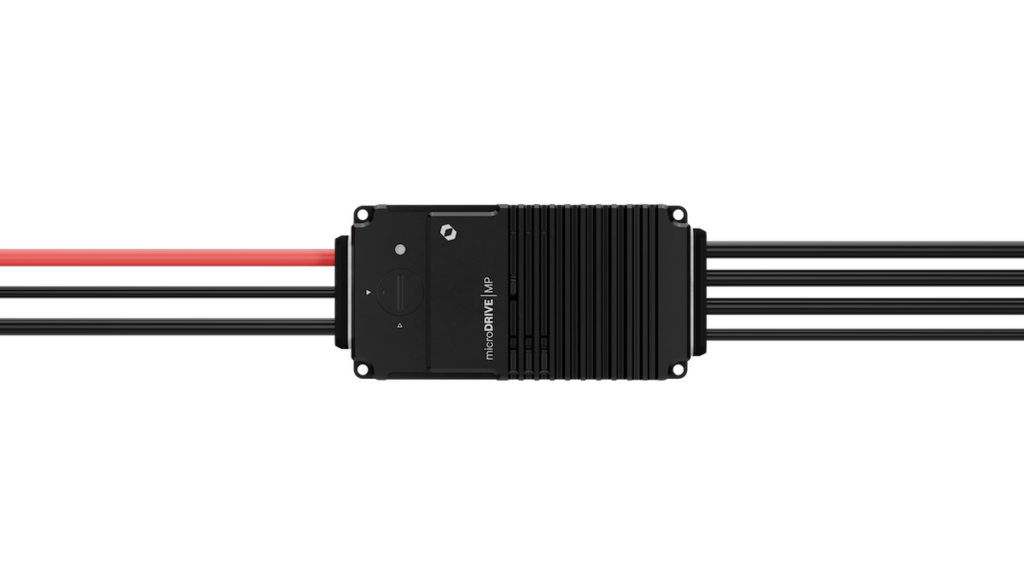
In the article below, Hargrave Technologies discusses the details around its electronic speed controllers (ESC), covering the difference between bus and phase current, how the company rates its ESCs, and diving into the complexities around powering ESCs.
Bus Current vs Phase Current
A common question received about brushless DC motor (BLDC) electronic speed controllers (ESCs) is the difference between bus current and phase current.
Hargrave Technologies’ ESCs are rated by their phase current output ability, and this distinction is important.
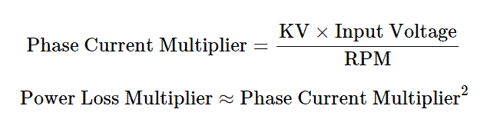
Hargrave Technologies’ BLDC ESCs control the motor’s speed by changing the voltage on the outputs to the motor (called the phase voltage). A duty cycle is output from 0-100%, which modulates voltage using a technique called pulse width modulation (PWM). This duty cycle determines the motor’s speed.
Motor RPM=KV×Duty Cycle %×Input Voltage
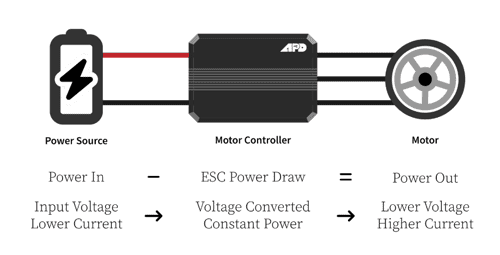
Why is this important? An ESC cannot create power, which means that the power into an ESC (from the power source) must equal the power out to the motor. There is a small amount of loss in the ESC itself. However, Hargrave Technologies’ units are typically >95% efficient.
The output voltage is always less than the input voltage. The ESC adjusts the phase current to compensate for the difference (power in must equal power out). The relationship between duty cycle and phase current becomes important when designing a BLDC system.
If the duty cycle is too low, phase currents can become very large very quickly (e.g. a propeller that is too big for a specific motor kV).
For example, consider a system that is drawing 50 V 100A from a battery. The ESC is commanded to operate at 50% duty cycle. Therefore, the output voltage to the motor is 25 V (50% duty cycle). The ESC will now compensate by increasing the output current to 200A (power in must equal power out; Power = Voltage x Current).
Rating an ESC
Hargrave Technologies rates ESCs by the phase current they can output under continuous and peak operating conditions. The amount of heat generated by an ESC is dependent mostly on the current output at any given time.