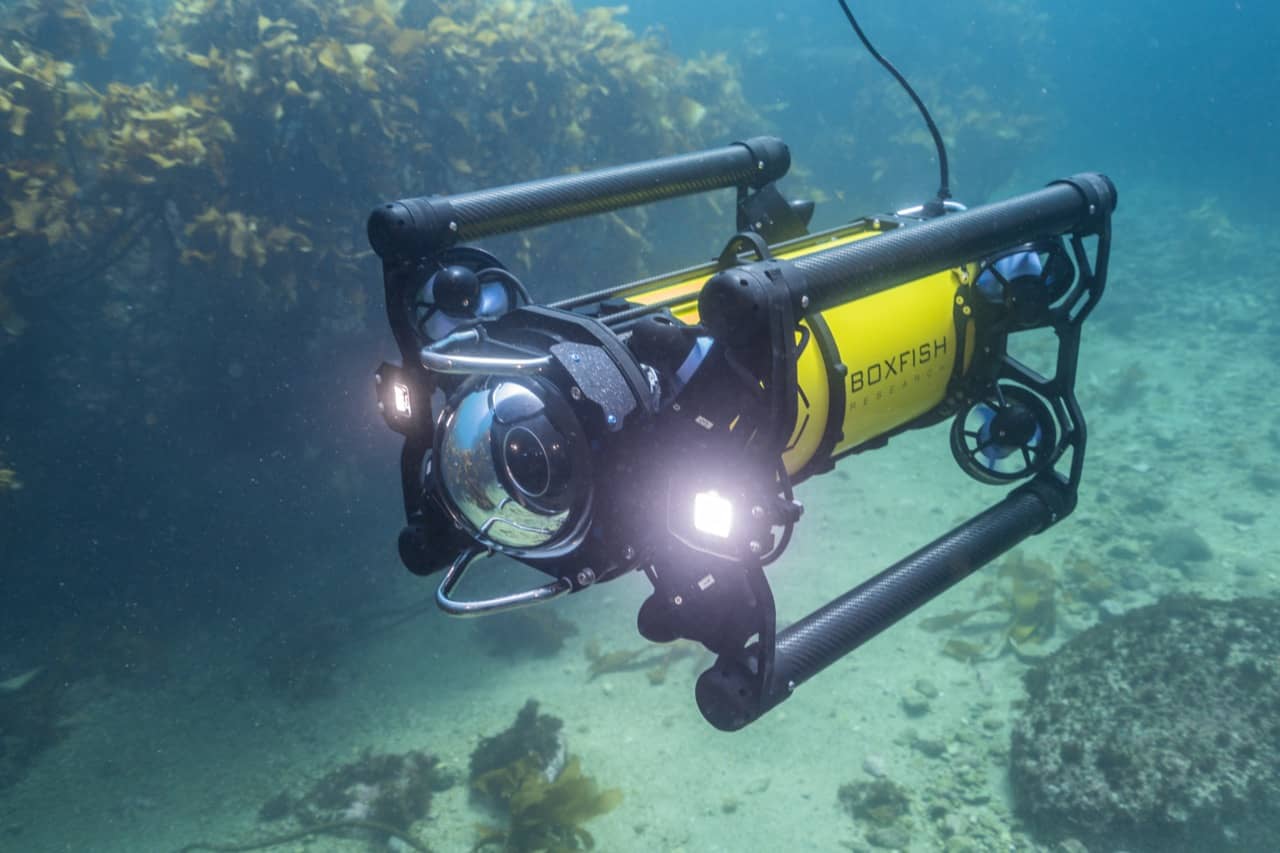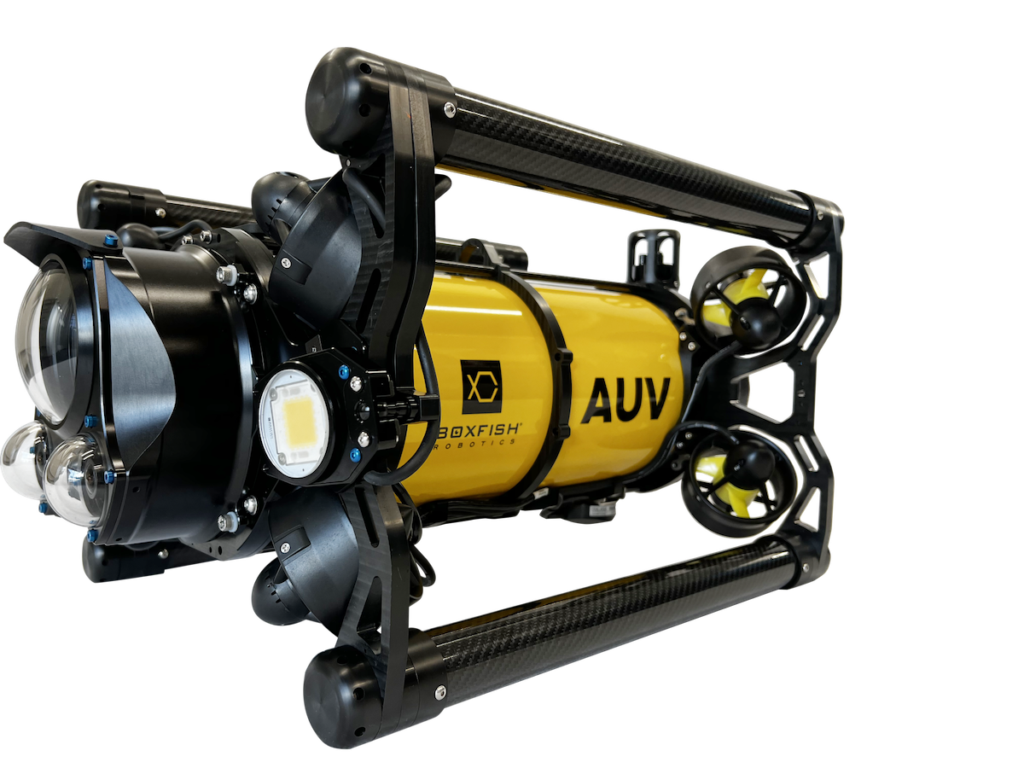
Boxfish Robotics‘ Autonomous Underwater Vehicle (AUV) demonstrates how autonomy reshapes video based seabed surveys, delivering consistent and repeatable transect footage at scale.
By executing pre planned missions without pilot intervention, the vehicles maintain controlled altitude, speed, and heading, producing uniform datasets suited to scientific research and regulatory monitoring.
Transect video surveys are widely used for habitat mapping, ecological assessments, and long term environmental studies. Conventional approaches including diver operations, Remotely Operated Vehicles (ROVs), and towed or drop camera systems provide valuable capabilities but can introduce variability in survey geometry, altitude control, and spatial accuracy.
Comparisons with Traditional Methods
Diver based work is constrained by depth and bottom time, ROV performance can be influenced by tether management and pilot workload, and towed systems may experience positional inconsistency due to vessel motion and cable dynamics. Autonomous execution standardises transect lines and reduces these operational limitations.
Camera angle and altitude are defined prior to deployment, and operators can complete a short quality control mission before commencing the primary survey. Once initiated, each transect is flown exactly as programmed, eliminating pilot induced variability and preserving consistent survey geometry across extended lines and repeated missions. Identical surveys can be re-run months or years later, supporting time series analysis and change detection.
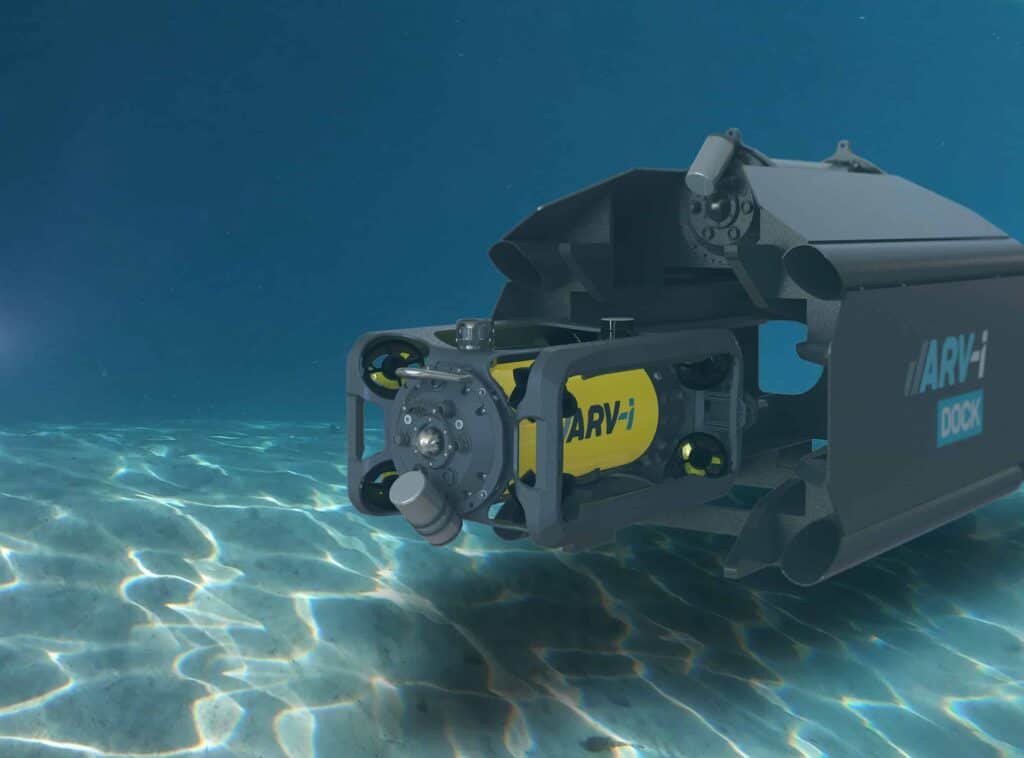
Autonomous capability allows multiple transects to be completed within a single deployment, increasing daily coverage while reducing operational complexity. Operating without a tether, the Boxfish AUV performs effectively in moderate currents and challenging conditions that may restrict diver deployment or complicate ROV use.
Synchronised Survey Data
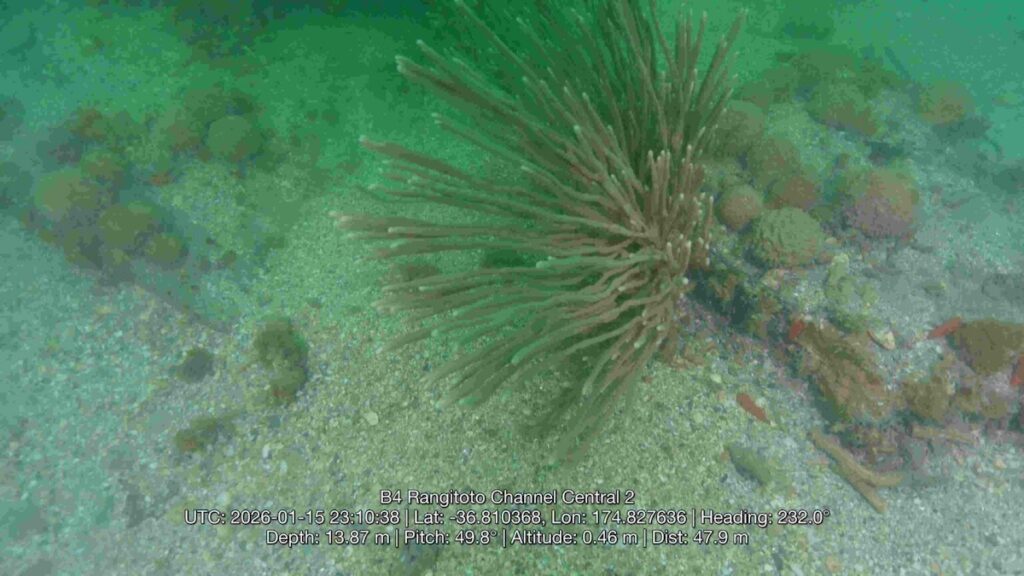
The Boxfish AUV synchronises video, navigation, and onboard sensor data to ensure precise temporal and spatial alignment for every recorded frame. The integrated dataset can be overlaid directly onto video or exported into GIS and analytical software platforms for visualisation, interpretation, and reporting.
By combining repeatable mission execution with synchronised data capture, Boxfish Robotics AUV provides a structured and scalable approach to underwater transect surveys that prioritises consistency, spatial accuracy, and long term monitoring value.
Learn more about autonomous transect video surveys with Boxfish AUV here.