Demuestra tus capacidades.
Si diseñas, construyes o suministras Correcciones GNSS, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.




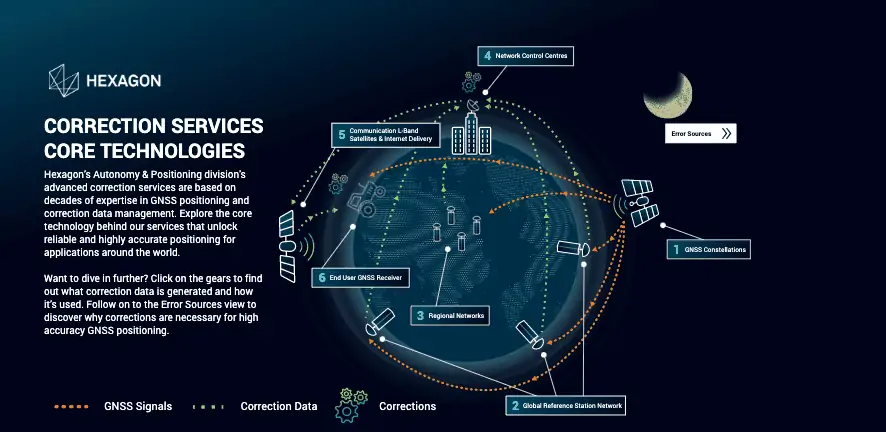
Las correcciones GNSS mejoran la precisión de posicionamiento de los vehículos no tripulados y los sistemas autónomos al compensar los errores en los datos de navegación por satélite.

Posicionamiento preciso para vehículos no tripulados: receptores GPS y GNSS, antenas y sistemas inerciales


Solución RTK de vanguardia que proporciona posicionamiento GNSS de precisión para UAV y sistemas no tripulados
Si diseñas, construyes o suministras Correcciones GNSS, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.

Las correcciones GNSS permiten una navegación, orientación y control precisos para vehículos no tripulados y sistemas autónomos en diversos ámbitos, incluidas aplicaciones militares, comerciales y científicas. Estas correcciones mejoran la fiabilidad y precisión de los datos de posicionamiento por satélite, lo que ayuda a los sistemas a mantener un rendimiento constante durante las operaciones en tiempo real o el análisis posterior a la misión. Los métodos de entrega varían e incluyen transmisiones por satélite, redes terrestres o tecnologías integradas, dependiendo de las necesidades operativas y la disponibilidad de infraestructura.
Los métodos de corrección GNSS varían según la arquitectura, el modo de entrega y la precisión de posicionamiento. Cada método se adapta a entornos operativos específicos y a las limitaciones del sistema.
Servicios de corrección PPP TerraStar® de NovAtel
Los servicios de corrección RTK utilizan mediciones de una estación base fija para corregir la posición de un receptor GNSS en movimiento, normalmente denominado «rover». Esta técnica permite un posicionamiento de alta precisión (a nivel centimétrico) en tiempo real mediante la transmisión de datos de corrección a través de radiofrecuencia o protocolos basados en Internet, como NTRIP. Los receptores RTK suelen integrarse en vehículos terrestres no tripulados (UGV), vehículos aéreos no tripulados (UAV) y otras plataformas autónomas en las que la localización precisa es fundamental. Estos receptores comparan continuamente sus señales satelitales con los datos de referencia de la estación base para eliminar los errores comunes, lo que hace que el RTK sea especialmente adecuado para operaciones en entornos localizados y conectados en red.
Aplicaciones:
La VRS se basa en la RTK y crea una estación de referencia sintética cerca del rover utilizando una red de estaciones base reales. Proporciona una corrección de posicionamiento continua y sin interrupciones en áreas geográficas más amplias que la RTK por sí sola.
Aplicaciones:
La cinética posprocesada (PPK) aplica correcciones GNSS después de la recopilación de datos, utilizando datos de posición registrados tanto por un receptor móvil como por una estación de referencia. A diferencia de RTK, PPK no requiere un enlace de comunicación continuo durante la operación. Las correcciones se calculan en el procesamiento posterior a la misión, lo que permite una estimación precisa de la posición sin conectividad en tiempo real. PPK se utiliza ampliamente en cartografía aérea, teledetección y misiones autónomas en las que la infraestructura en tiempo real es limitada o no está disponible.
Aplicaciones:
Los SBAS (por ejemplo, WAAS, EGNOS) transmiten correcciones a través de satélites geoestacionarios. Estos sistemas compensan los errores ionosféricos y la deriva del reloj para mejorar la precisión del GPS en todos los continentes.
Aplicaciones:
Los modelos de corrección basados en SSR separan las diferentes fuentes de error del GNSS (por ejemplo, la órbita del satélite, el reloj, la ionosfera) y las envían al receptor, que luego aplica las correcciones pertinentes.
Aplicaciones:
El PPP calcula posiciones de alta precisión utilizando un único receptor GNSS y correcciones satelitales disponibles a nivel mundial. No requiere una estación base local, pero exige un tiempo de convergencia más largo.
Aplicaciones:
Al combinar la cobertura global de PPP con la rápida convergencia de RTK, PPP-RTK mejora la precisión y el tiempo de arranque mediante correcciones regionales basadas en SSR que se transmiten a través de redes o satélites.
Aplicaciones:
El DGNSS utiliza correcciones de estaciones de referencia cercanas para mejorar la precisión posicional. Aunque es menos preciso que el RTK, es compatible con sistemas heredados y ofrece una cobertura más amplia.
Aplicaciones:
Las correcciones integradas utilizan módulos integrados para aplicar correcciones sin conectividad continua. Las técnicas de corrección sin conexión se aplican después de la misión mediante datos GNSS registrados.
Aplicaciones:
Los datos de corrección se transmiten a través de Internet a los dispositivos conectados, a menudo utilizando protocolos NTRIP. Estos servicios permiten implementaciones escalables y multivehículo con gestión centralizada.
Aplicaciones:
Las tecnologías de corrección GNSS se integran en los ámbitos aéreo, terrestre, marítimo y espacial para dar soporte al posicionamiento crítico en sistemas no tripulados:
El método de entrega de las correcciones GNSS varía en función de la infraestructura, los requisitos de latencia y la resiliencia:
Las soluciones de corrección GNSS para defensa e infraestructuras críticas deben cumplir con los estándares normativos y de rendimiento:
Para seleccionar el enfoque de corrección GNSS adecuado es necesario evaluar métricas de rendimiento clave:
Las innovaciones emergentes en la corrección GNSS tienen como objetivo mejorar la flexibilidad, la resiliencia y la escalabilidad:
 Búsqueda de empresas y productos
Búsqueda de empresas y productos



 Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.
Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.
