Wenn Sie entwerfen, bauen oder liefern Glasfasergyroskope, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Hawkeye EG-1300 Navigationsfähiges FOG von EMCORE Corporation
Faseroptische Gyroskope (FOG) messen die Winkelgeschwindigkeit eines Objekts mithilfe einer Laserquelle, die zwei Lichtstrahlen in entgegengesetzte Richtungen entlang derselben Länge einer gewickelten Glasfaser projiziert. Bei Drehung legt ein Strahl eine größere Strecke zurück als der andere, und wenn sich die beiden Strahlen wieder treffen, entsteht ein Interferenzmuster, mit dem die Drehgeschwindigkeit berechnet werden kann.
Die Empfindlichkeit und Leistung eines faseroptischen Gyroskops hängt in der Regel vom Durchmesser der Spule und der Anzahl der Windungen ab. FOGs sind kostengünstiger als Ringlasergyroskope (RLGs), jedoch in der Regel teurer und leistungsstärker als MEMS-Gyroskope (mikroelektromechanische Systeme). Da sie keine beweglichen Teile enthalten, sind sie auch wesentlich unempfindlicher gegenüber Stößen und Vibrationen als MEMS-Gyroskope.
FOGs und IMUs für die unbemannte Navigation
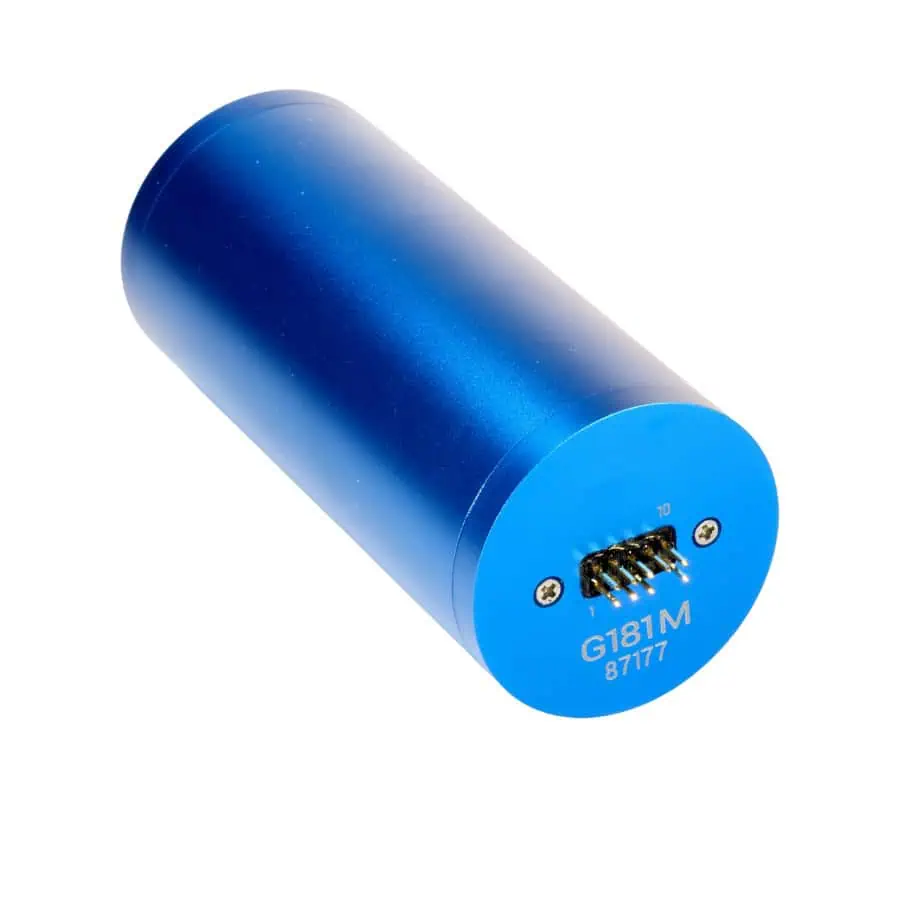
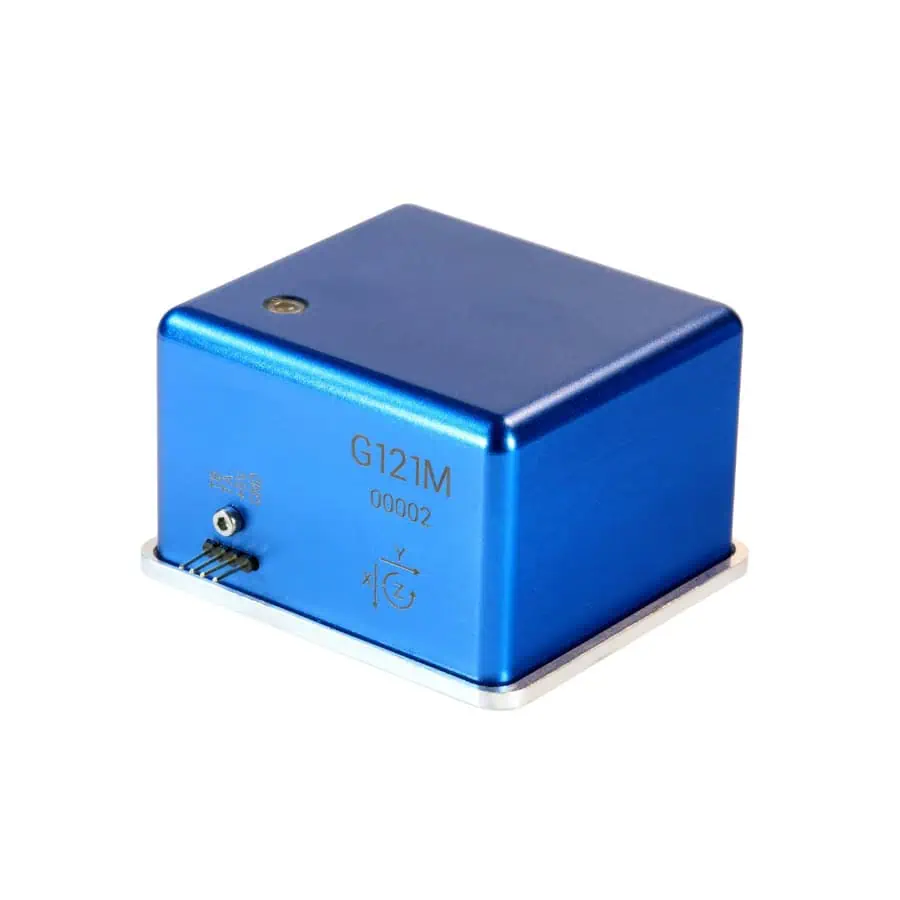
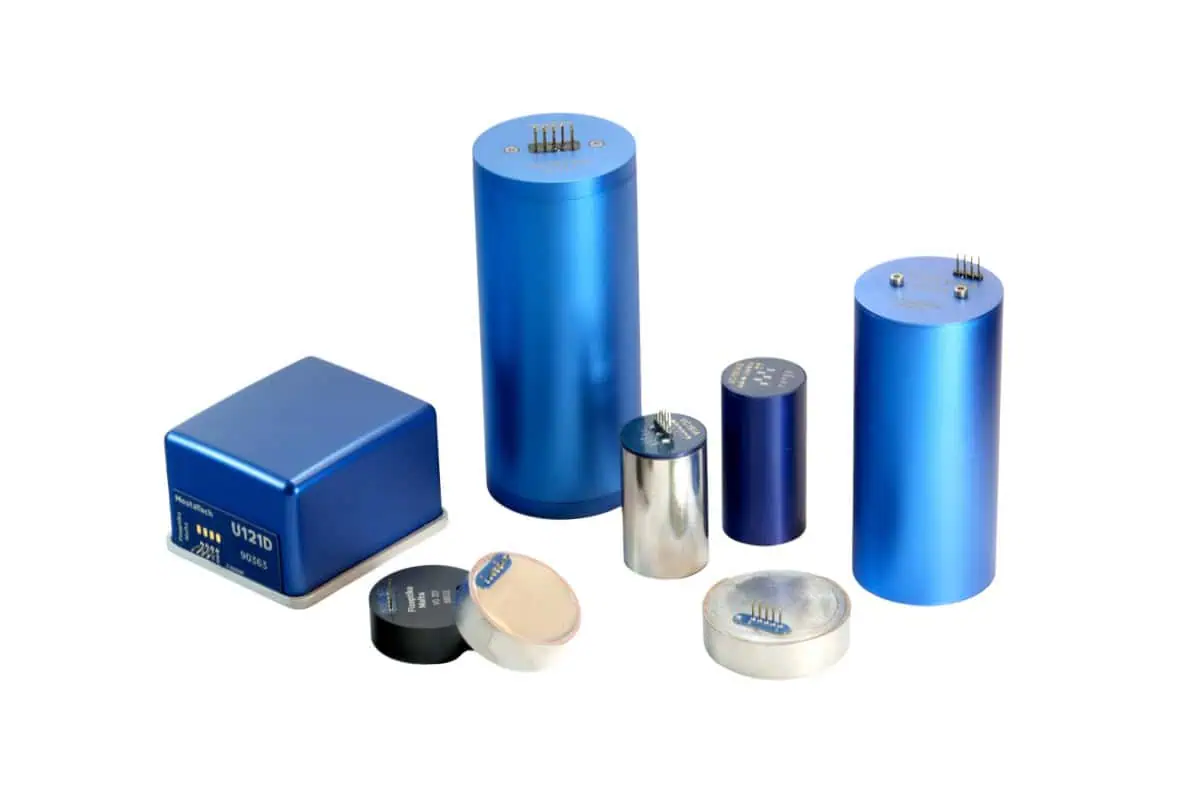
Glasfasergyroskope und IMUs von MostaTech
FOGs können mit Beschleunigungsmessern und Gyroskopen kombiniert werden, um eine Trägheitsmesseinheit (IMU) zu bilden. Die Winkelgeschwindigkeitsmessungen des Gyroskops können zur Berechnung der Lage (Gieren, Neigen und Rollen) von UAVs (unbemannte Luftfahrzeuge), USVs (unbemannte Oberflächenfahrzeuge) und anderen Roboterplattformen verwendet werden.
Glasfasergyroskope können auch für die hochpräzise Ausrichtung und Stabilisierung von Antennen, Kardanaufhängungen und anderen Drohnen-Subsystemen verwendet werden und liefern außerdem Informationen für Trägheitsnavigationssysteme (INS).