Jeśli projektujesz, budujesz lub dostarczasz Żyroskopy światłowodowe, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Hawkeye EG-1300 FOG klasy nawigacyjnej firmy EMCORE Corporation
Żyroskopy światłowodowe (FOG) mierzą prędkość kątową obiektu za pomocą źródła laserowego, które wyświetla dwie wiązki światła w przeciwnych kierunkach wzdłuż tej samej długości zwiniętego światłowodu. Podczas obrotu jedna wiązka pokonuje większą odległość niż druga, a gdy obie wiązki ponownie się spotykają, powstaje wzór interferencyjny, który można wykorzystać do obliczenia prędkości obrotowej.
Czułość i wydajność żyroskopu światłowodowego zależy zazwyczaj od średnicy zwoju i liczby zwojów. FOG są tańsze niż żyroskopy laserowe pierścieniowe (RLG), ale zazwyczaj są droższe i zapewniają wyższą wydajność niż żyroskopy MEMS (mikroelektromechaniczne systemy). Ponieważ nie zawierają żadnych ruchomych części, są również znacznie mniej wrażliwe na wstrząsy i wibracje niż żyroskopy MEMS.
FOG i IMU do nawigacji bezzałogowej
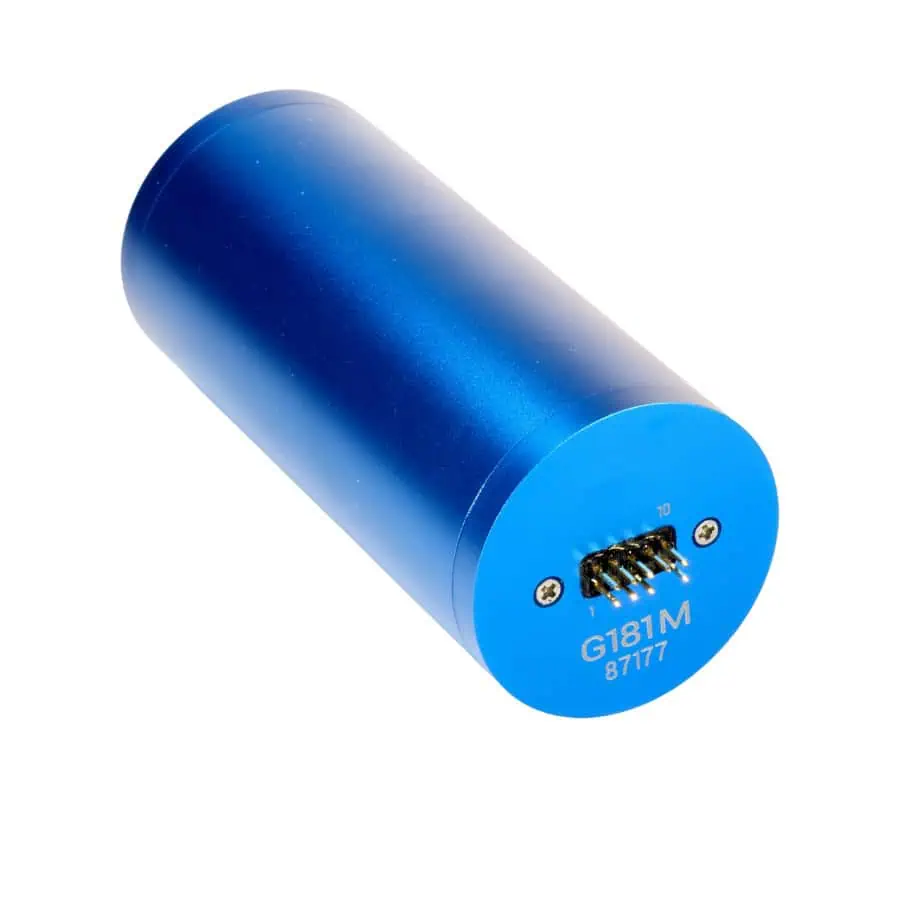
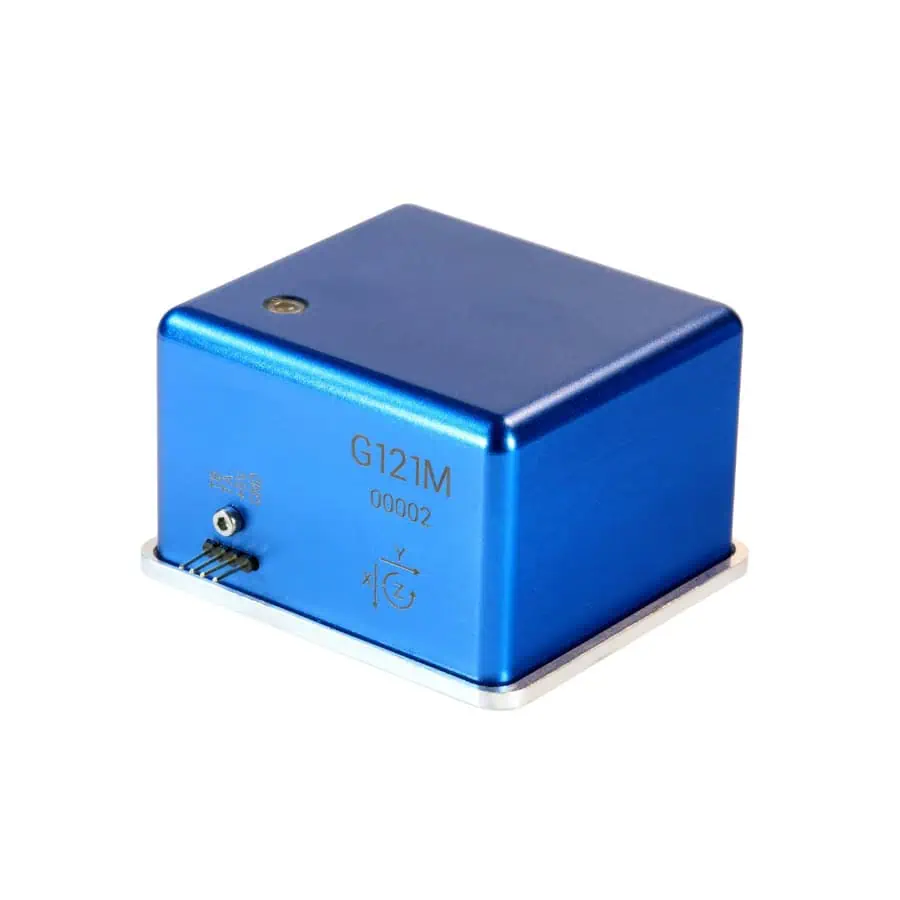
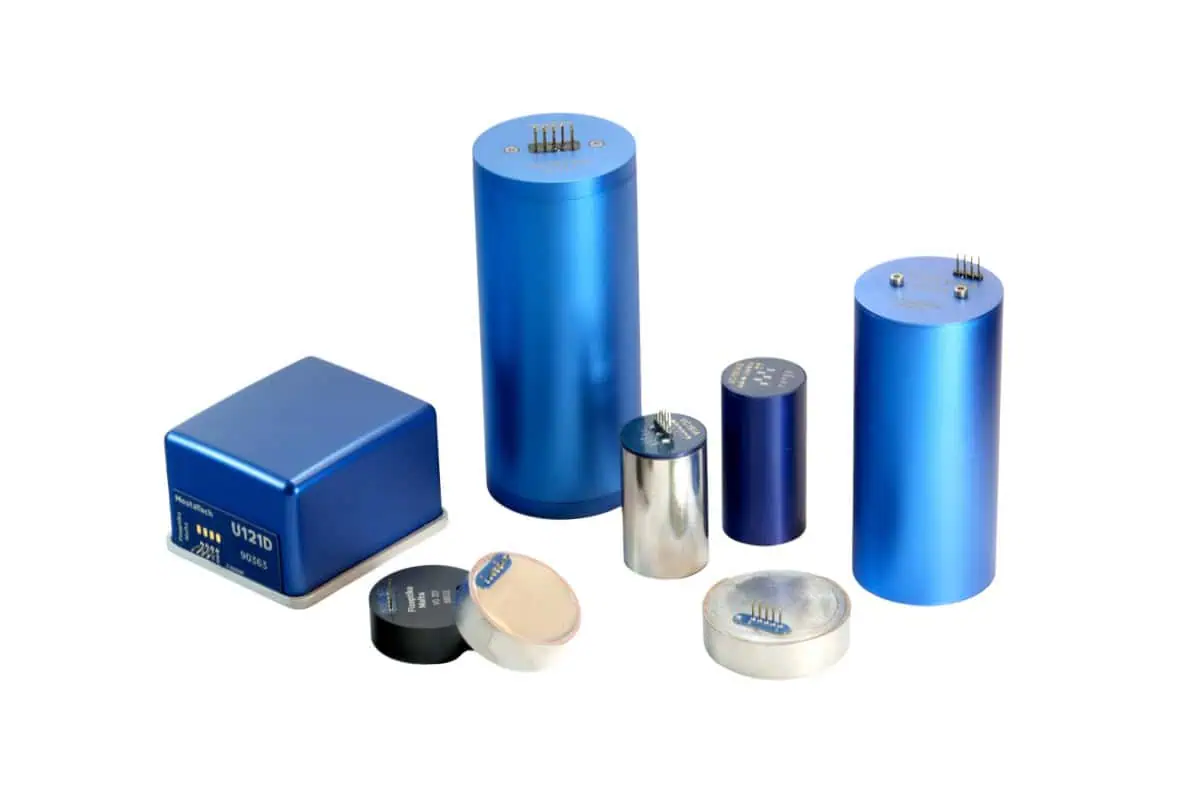
Żyroskopy światłowodowe i IMU firmy MostaTech
FOG mogą być łączone z akcelerometrami i żyroskopami, tworząc jednostkę pomiaru bezwładnościowego (IMU). Pomiary prędkości kątowej żyroskopu mogą być wykorzystywane do obliczania położenia (odchylenia, nachylenia i przechyłu) bezzałogowych statków powietrznych (UAV), bezzałogowych statków powierzchniowych (USV) i innych platform robotycznych.
Żyroskopy światłowodowe mogą być również wykorzystywane do precyzyjnego ustawiania i stabilizacji anten, gimbali i innych podsystemów dronów, a także mogą dostarczać informacji dla inercyjnych systemów nawigacyjnych (INS).