Trouvez des développeurs de logiciels d'autonomie et de logiciels pour la robotique, y compris des SDK (kits de développement logiciel) et des middlewares robotiques pour les systèmes sans pilote.
Pilotes automatiques marins, communications pour véhicules de surface sans pilote, modules de gestion de l'alimentation, simulateurs marins et logiciels
Si vous concevez, construisez ou fournissez Logiciels d’autonomie, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Logiciels pour la robotique et les systèmes sans pilote
Logiciel Neptune Autonomy pour ASV et ROV par SeeByte
Il existe une grande variété de logiciels destinés à faciliter le développement de systèmes robotiques et de véhicules, notamment les UAV (véhicules aériens sans pilote), les UGV (véhicules terrestres sans pilote), les USV (navires de surface sans équipage) et les UUV (véhicules sous-marins sans pilote). Les logiciels robotiques peuvent faciliter la conception de ces systèmes ou fournir des capacités essentielles telles que l’autonomie et la prise de décision.
Kits de développement logiciel
Les SDK (kits de développement logiciel) robotiques permettent aux développeurs de créer des applications pour des plateformes robotiques particulières et d’accélérer le développement en éliminant la nécessité de créer tous les logiciels à partir de zéro. Les SDK peuvent fournir des blocs de construction pré-écrits ou des API qui simplifient le contrôle de certaines fonctionnalités du robot, telles que les bras ou les systèmes de propulsion, et peuvent également fournir des algorithmes pour des capacités telles que la perception, la navigation et l’IA (intelligence artificielle).
Intergiciels
Les intergiciels robotiques sont des logiciels qui permettent aux développeurs de gérer plus facilement la complexité des systèmes robotiques, en fournissant souvent un cadre ou une architecture qui abstrait certaines de ces complexités, telles que les communications de bas niveau. La plupart des intergiciels couramment utilisés, tels que ROS (Robot Operating System), sont open source.
Applications
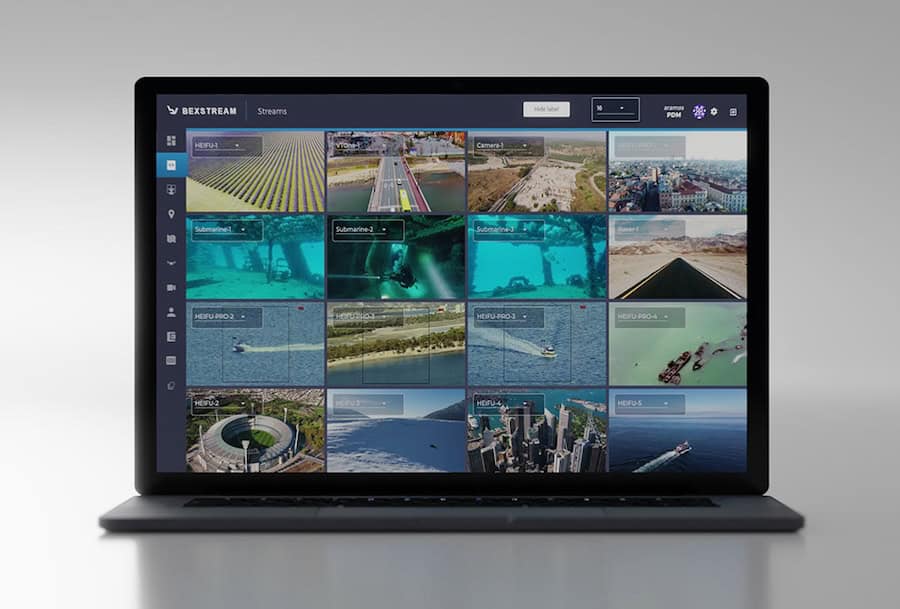
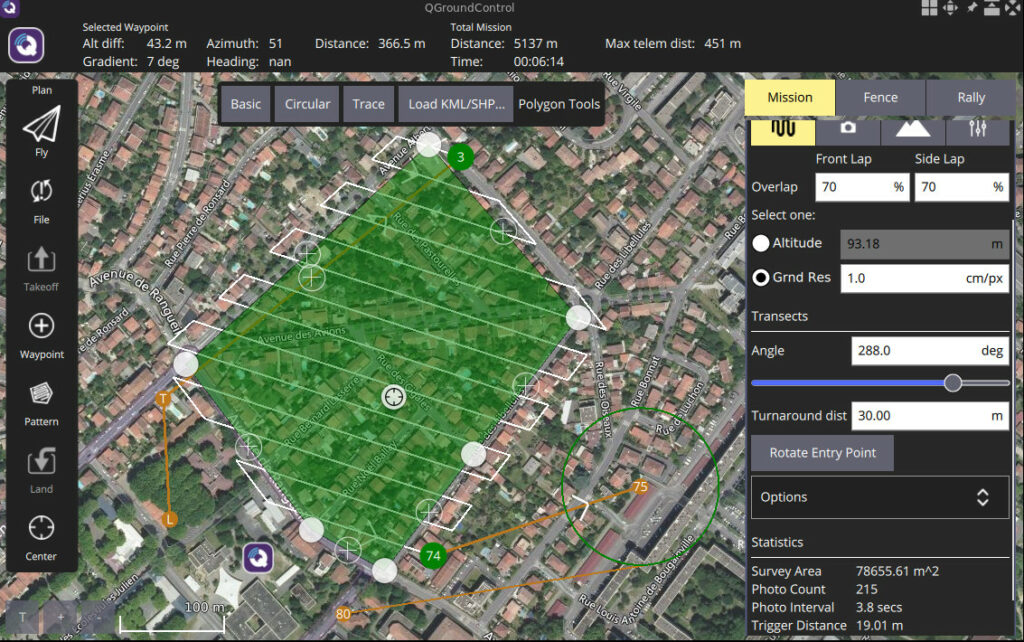
VOTIX FLY – Logiciel et connectivité indépendants du drone pour BVLOS par VOTIX
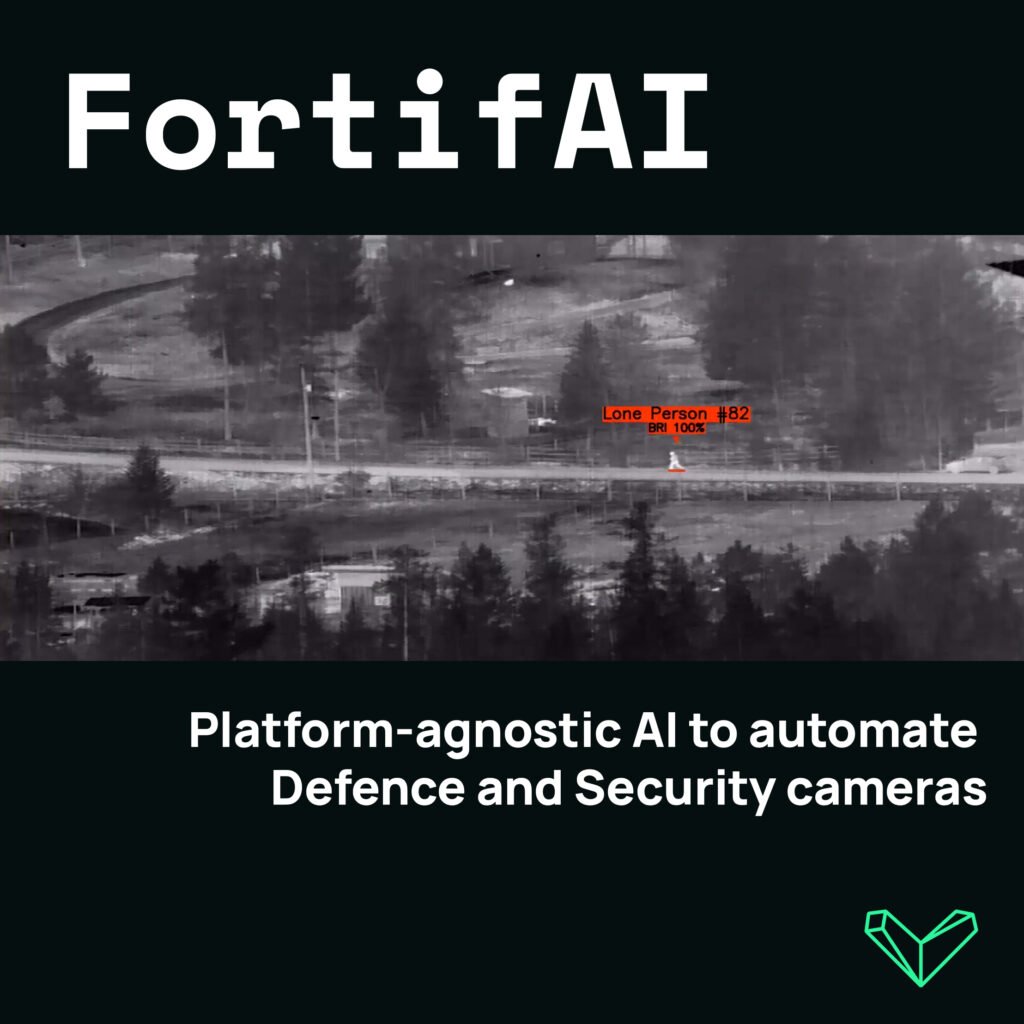
Les logiciels de robotique et d’automatisation peuvent doter les véhicules de capacités telles que le suivi de trajectoire et la détection d’obstacles, ainsi que de capacités de navigation plus avancées telles que le SLAM (localisation et cartographie simultanées), qui permet à un véhicule de fonctionner dans un environnement auparavant inconnu, en créant et en mettant à jour une carte tout en naviguant et en se localisant avec succès dans la zone. Les logiciels d’IA peuvent également être utilisés pour fournir une gamme de capacités avancées, notamment la vision par ordinateur, la reconnaissance et la classification d’images, et la conduite autonome.
Conception et modélisation
Il existe également une large gamme de progiciels pour la conception et la modélisation du matériel des systèmes robotiques, notamment des logiciels de CAO 3D. Ces progiciels peuvent inclure des capacités de simulation approfondies avec une physique complexe, permettant de tester les conceptions pour leur fonctionnement mécanique et dans différentes conditions environnementales simulées, telles que des conditions hydrodynamiques, un terrain et des conditions météorologiques variables.