In this article, Blue Marble Geographics details the Automatic Point Cloud Analysis tool in Global Mapper Pro v25, and discusses classifying point clouds, new automatic classification methods, and extracting vector features.
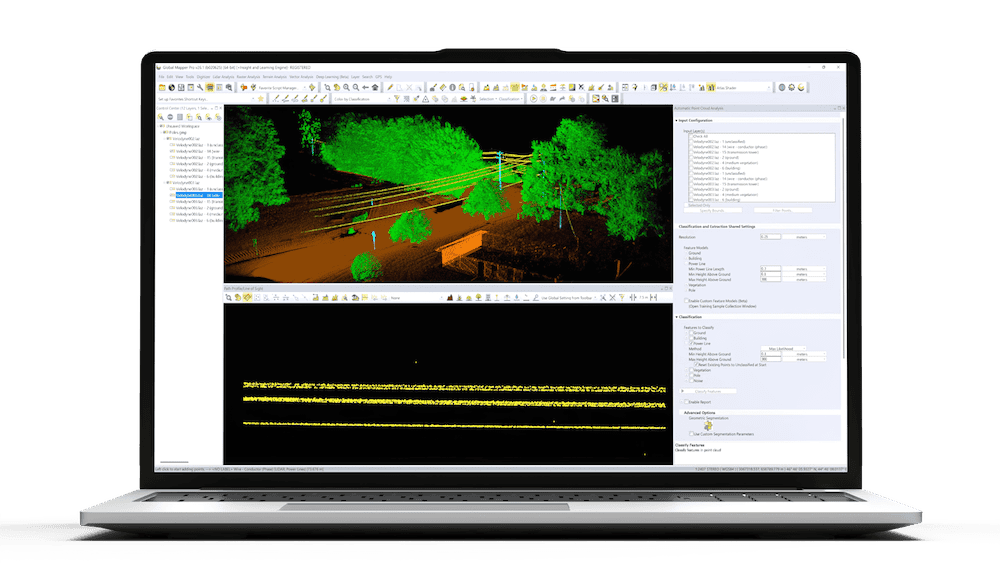
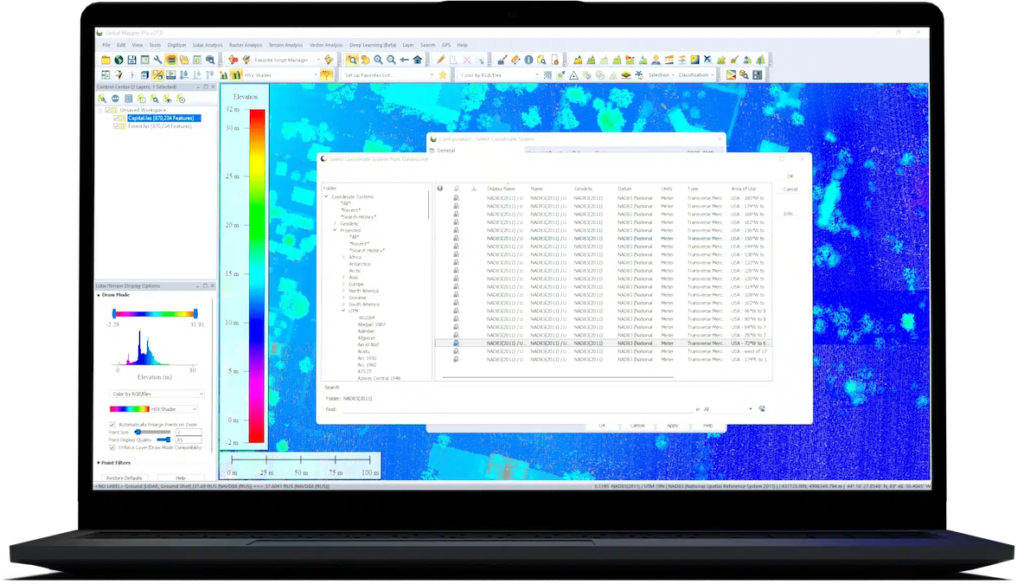
New in v25, the Automated Point Cloud Analysis Tool has replaced the Lidar Analysis toolbar as the hub of point cloud classification, segmentation, and extraction tools in Global Mapper Pro. From this window, you can choose which layers are to be operated on, filter or limit processing, open tools as tabs in a new or adjacent pane, and handle feature models for classification.
In the new release of Global Mapper v25, returning users may have noticed that the classification, segmentation, and extraction tools have undergone a complete overhaul. In fact, the entire Automatic Point Cloud toolbar is missing. Don’t worry! All of your favorite tools and settings are still available. These tools have been combined into one dialog to allow them to share overlapping settings and to provide the ability to run multiple classifications simultaneously. This combined dialog is called the Automatic Point Cloud Analysis tool.
Previously, processing a point cloud required repeated steps as you opened each individual tool and specified settings such as bounds and resolution. The Automatic Point Clouds Analysis tool combines these tools into one window. Settings can be shared, not only between classifications but also between classification and extraction.

Point cloud classification, segmentation, and extraction tools can now be found in the Automatic Point Cloud Analysis tool.
Custom Classification Training Tool
The segmentation tool is extremely useful for dynamically classifying points based on existing attributes. What if you could train Global Mapper to look for similar features in other point clouds? Global Mapper’s existing automatic classification tools cover the most commonly classified point structures, such as ground, buildings, and poles. The new Custom Feature tool lets you define custom classifications based on user-created training samples. You can now create your own automatic point cloud classifications to find unique objects in your data.
Segmentation finds objects in a point cloud by looking at the attributes and structure of the points. For example, to segment paint stripes on the road, you would look for points that make up a flat surface, have the same color, etc. This method operates on the assumption that each “object” in the point cloud, each cluster of points, has a signature made up of attributes and/or structures that separate it from its neighbors. The new Custom Feature Template tool takes advantage of these signatures and lets you train a custom classification tool to look for a specific signature in the point cloud.


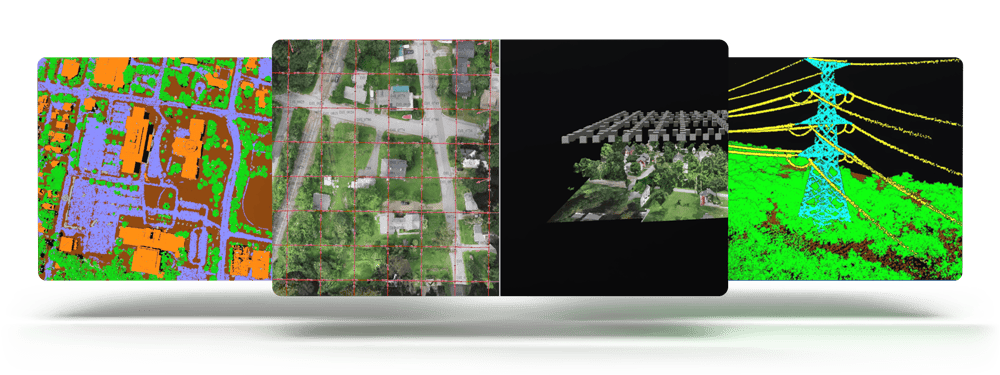
This point cloud has been segmented so individual cars are separated from the surrounding points. These car points were then used to train a new automatic classification tool to identify cars.
Classifying Point Clouds

The Classification tool contains the familiar tools and settings, plus new classification methods.
Classification is enabled by default when the Automatic Point Clouds Analysis tool is opened. All of the automatic classification methods from previous versions are available in one window. Previously, each method had its own tool, with separate settings that all needed to be run sequentially. Here, you can check one or all of the classifications, and Global Mapper will run them in a prespecified order depending on the methods chosen. The typical order is noise, ground, building, vegetation, powerline, then pole. Note: don’t forget to check the additional shared settings in the Point Cloud Analysis window.
New Automatic Classification Methods
Returning users may remember the “Non-Ground” building and vegetation classification tool from previous versions of Global Mapper that had two different analysis methods for identifying structures in the point cloud: Gridding and Segmentation. This concept has been expanded to ground and noise classifications. Use the drop-down menus to choose a method for each class.
Gridding, also called MCC (Multiscale Curvature Classification), is the original legacy method. Lidar used to be predominantly gathered by fixed-wing aircraft, and that’s the type of data that this method is built to use. Gridding has been largely superseded by the Max Likelihood method. For data collected by means other than fixed-wing aircraft, use the Max Likelihood method.
Max Likelihood is a segmentation method. For each classification type, the tool has been tailored to find common shapes and characteristics of these features in the point cloud. While these options have fewer settings than the grid methods, there is an option to adjust the settings to your point cloud further using the Custom Classification tool. When enabled, you can train the automatic classifications. See Custom Classification Training from the below section to learn more.
Tip: the undo functionality also works on classifications. Press (ctrl z) to undo recent actions.
Geometric Segmentation
Segmentation is a powerful tool unique to Global Mapper. It is a user-guided, automatic tool that breaks the point cloud into smaller groups called segments based on the spatial and attribute relationships between points in the point cloud. It finds objects in a point cloud by looking at the attributes and structure of the points. For example, to segment paint stripes on the road, you would look for points that make up a flat surface, have the same color attribute, etc. By segmenting a point cloud into smaller sections, users are better able to select clusters of points for manual classification or to train a custom classification.
To see an example use case, check out this blog with the old-style dialog box on using segmentation to classify transmission towers. These segmentation settings are transferable to the new dialog and can be used to train a custom classification tool.

Segmentation is a way to identify clusters of points that make up an object, such as these towers.
Extracting Vector Features
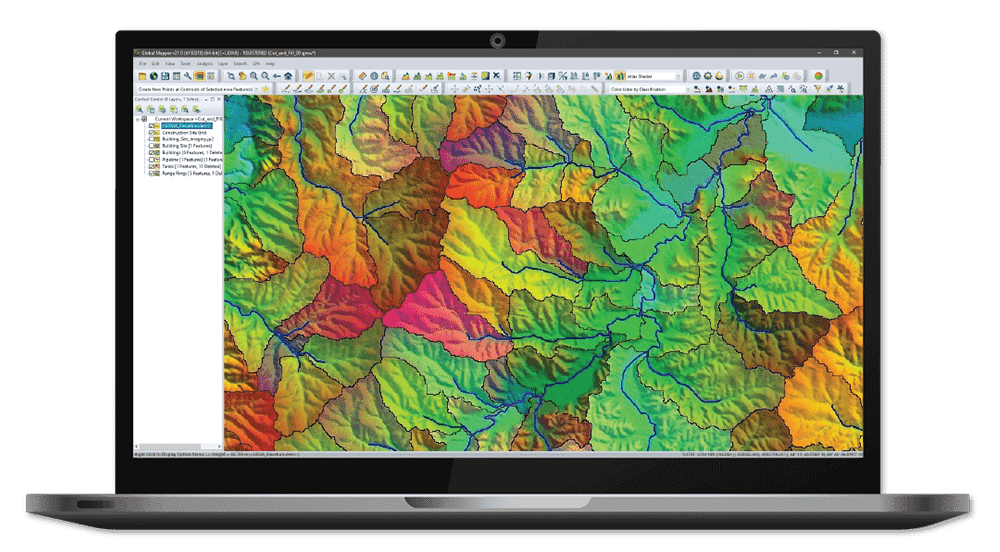
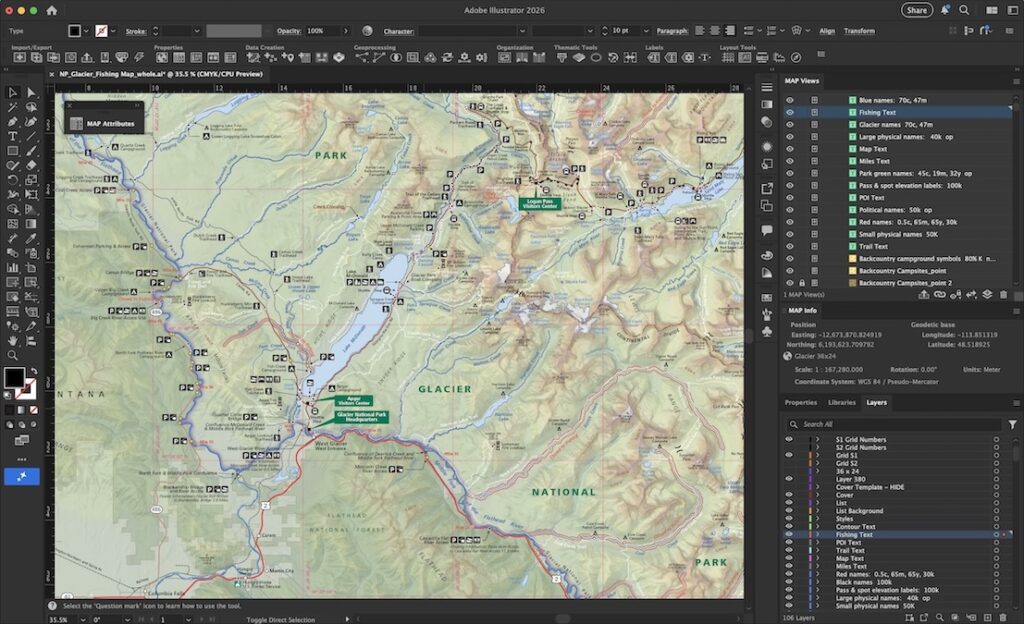
After a point cloud has been classified, features can be extracted as 3D point, line, or area features using the Feature Extraction tool. This is another place where the shared Feature Model settings come in handy. Settings used to classify features will then be used to extract them. Extracted layers will inherit many of the attributes of the original features, such as height, elevation, or crown canopy width. New in this tool is an improved method for measuring tree canopy areas and all new 3D mesh features to estimate the structure of tree canopies.

The building features in this airport were extracted from a classified point cloud.
Try Global Mapper Pro with a free 14-day trial today. If you have any questions, please contact us.