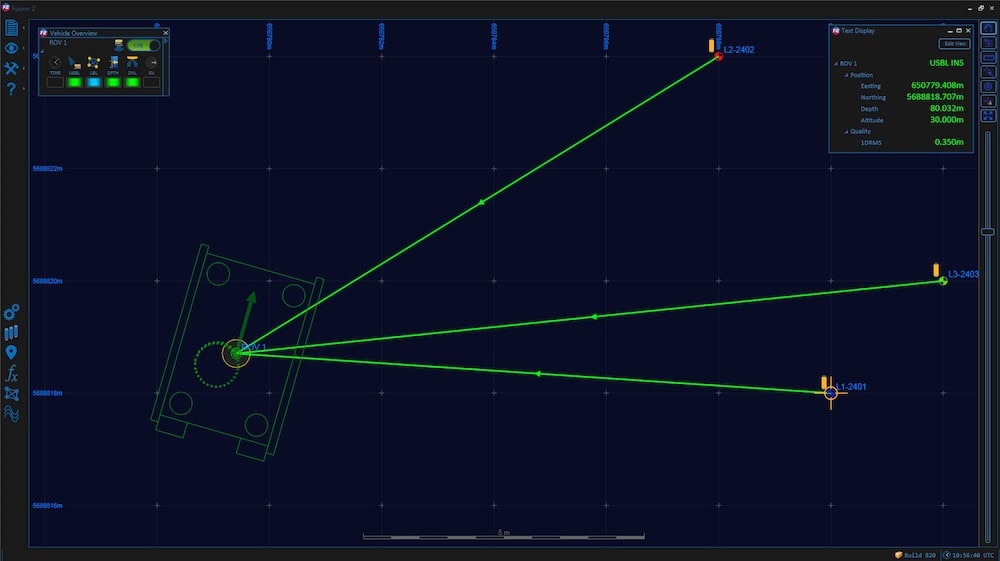
Sonardyne’s Ranger 2 Subsea Positioning (USBL) System is designed for deep and shallow-water tracking of subsea vessels and with an operating range of greater than 7000m, is a high-performance USBL (Ultra-Short Base Line) subsea vehicle positioning system that provides an optimal accuracy of better than 0.1%. In the below videos, Sonardyne representatives use the Ranger 2 Marine Robotics Pack bolt on with Ranger 2 software to demonstrate its telemetry control, remote time sync and remote control.
The telemetry control enables the user to send commands and updates subsea to underwater robotics platforms. For example, a surface vessel can send all position updates to a swarm of unmanned underwater vehicles providing situational awareness and an up-to-date real world position subsea.
The remote time sync feature enables the user to pass UTC time synchronisation from a surface vessel or uncrewed surface vessel to underwater sources, such UUVS or AUVS. This ensures all your robotics platforms are aligned with each other. Internal clocks drift, so tight time synchronisation is essential for precise subsea navigation.
The remote control feature enables user to have remote control of an unmanned surface vessel or mother ship for over the horizon operations. Commands can be sent via a low bandwidth link like RF or sat comms to command and control unmanned vessels from over-the-horizon operations avoiding Remote desktop bandwidth limitations. This is ideal for sending remote commands to unmanned surface vessels (USVs).