Sonardyne’s newly delivered Smart Sound Connect Subsurface infrastructure has successfully completed a live collaborative demonstration involving multiple surface and subsea robotic platforms.
Led by the University of Plymouth alongside Plymouth Marine Laboratory (PML), the three-year, £1.2 million project expands the existing Smart Sound Plymouth marine autonomy testbed and the Western Channel Observatory. The new subsurface network introduces a seabed node array for absolute positioning and communications, alongside other intelligent sensors within a highly characterised environment.
The all-day demonstration allowed visitors from business, science, defence, and national bodies to view the integration capabilities live from PML’s onshore remote operations centre at its campus in Plymouth. Platforms from ACUA Ocean, ecoSUB Robotics, Seaber, and Sonardyne worked together above and below the surface.
Professor James Fishwick, Head of Innovation for Smart Sound Plymouth (at PML), said: “Smart Sound Plymouth is going from strength to strength. The addition of the subsurface network enables even greater integration between platforms and supports our state-of-the-art testing capabilities for autonomous vehicles and advanced technologies. It complements the high-speed military-encrypted network above the surface and helps provide a fully connected environment. This successful technology demonstration further reflects Plymouth’s place as a world-leading hub for marine autonomy.”

Dr Lilian Lieber, Senior Research Fellow at the University of Plymouth, added, “SSCS provides a unique opportunity to test new ocean observing technologies. For me, its value lies in turning prototypes and field-tested technologies into trusted data streams, accelerating ocean observing towards autonomous sensing and near-real-time insight. This helps turn ocean data into actionable intelligence for climate resilience, early warning and preparedness, while the infrastructure itself enables technology innovation and stronger industry collaboration.”
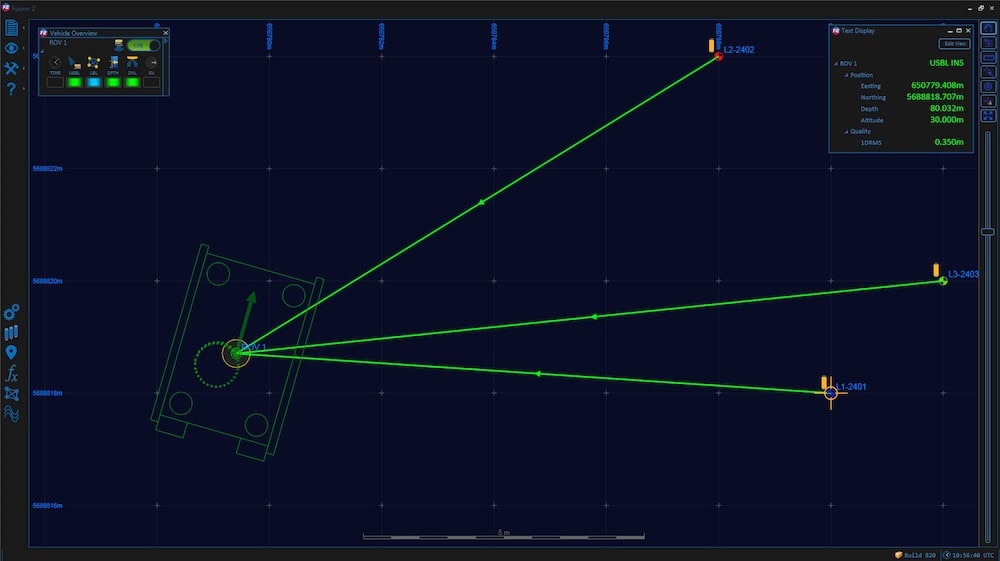
A key element of the new infrastructure is a seabed node array that provides absolute positioning and communications using passive Ultra-Short BaseLine (USBL) technology for testing underwater systems in a real-world, highly characterised testing environment.
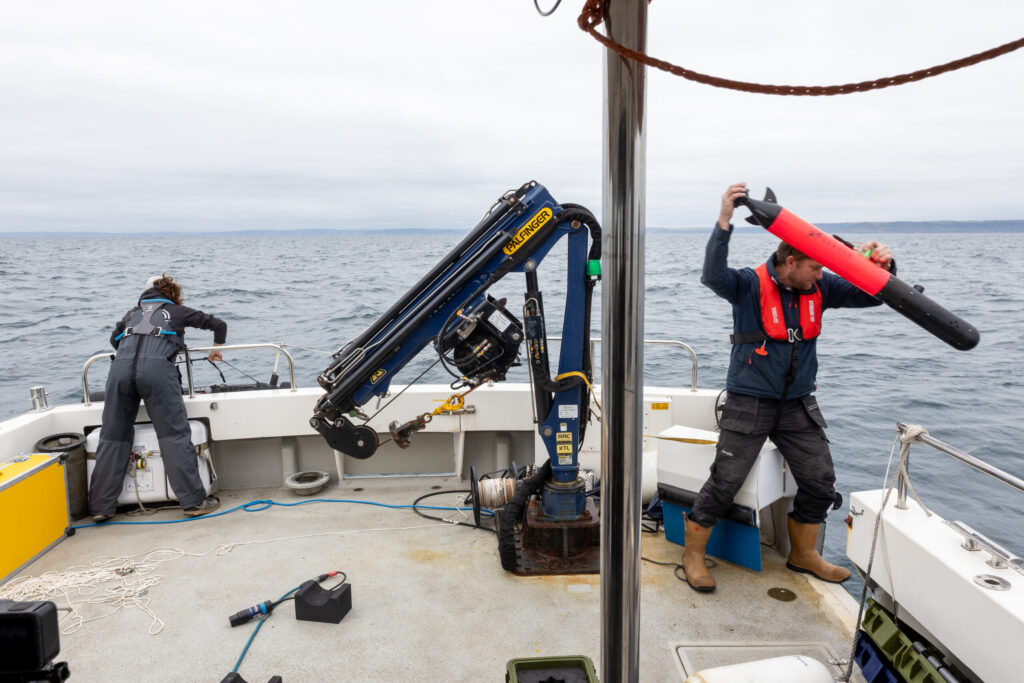
During the trial, both the University of Plymouth’s Seaber autonomous underwater vehicle (AUV) and an ecoSUB AUV navigated simultaneously using only this seabed node array. At the surface, a PIONEER uncrewed surface vessel (USV) from Plymouth-based ACUA Ocean tracked and controlled the AUV from Southampton-based ecoSUB using a Sonardyne Ranger 2 Gyro USBL positioning system mounted on the USV.
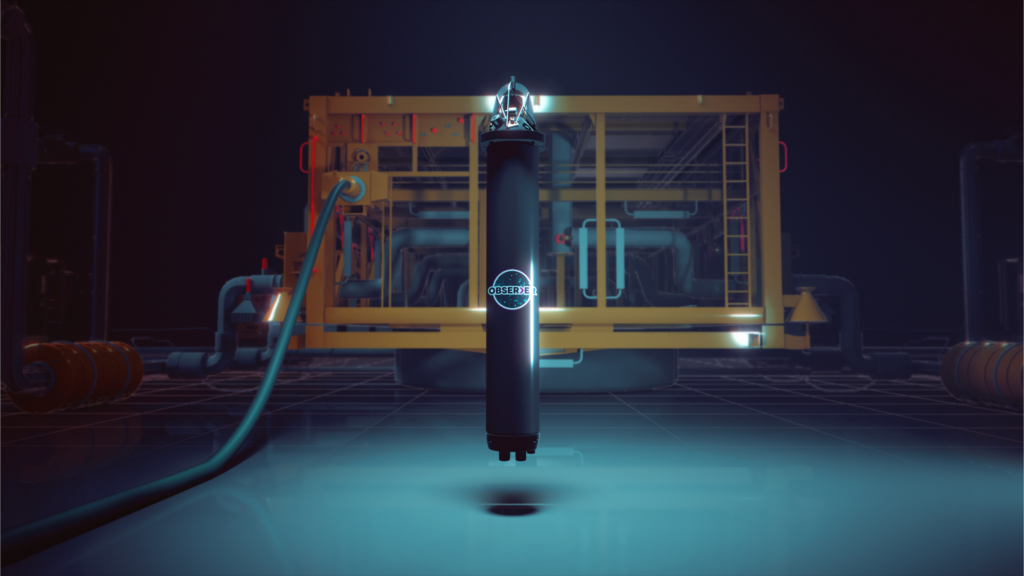
The USV also wirelessly harvested data from a permanently deployed Sonardyne Origin 600 acoustic Doppler current profiler (ADCP) in the SSCS, which transmits real-time data to shore, including through a live internet feed as part of the Western Channel Observatory via the long-running L4 oceanographic monitoring station.
Marine software engineering firm Marine AI also showed how vessels can continue navigating using Sonardyne’s SPRINT-Nav when GNSS drops out, based on trials conducted in the SSCS earlier this year.
Geraint West, Business Development Advisor at Sonardyne, said, “This ability to test and accelerate marine autonomous system innovation in a known environment with the type of infrastructure we now have in the SSCS is a real boost not just for Plymouth.
“The demonstration had interest from around the UK and internationally, with visitors from North America and Asia and from a wide range of stakeholders, military, commercial, science and industry. It just shows the reputation Plymouth now has and continues to build for marine autonomy, thanks to the environment, ecosystem and collaboration we have in the city and in Plymouth Sound.”
John Hunnibell, Chief Product Officer at ACUA Ocean, stated, “This demonstration provided an excellent opportunity to demonstrate the persistent mission utility and seagoing characteristics of our USV PIONEER as a ‘mothership’ for nested robotics, data harvesting and data transfer at sea.
“Specifically, we used this event to demonstrate that the USV PIONEER can deliver subsea monitoring and security for critical underwater infrastructure by teaming with multi-static seabed sensor nodes. It was also a great way to develop our relationships with capable, credible technical partners: Sonardyne, ecoSUB, PML and the University of Plymouth in Smart Sound Plymouth.”
Iain Vincent, Director & General Manager at ecoSUB Robotics, added, “Smart Sound and the SSCS environment has already been an extremely useful resource for ecoSUB Robotics. Most recently we have collaborated with Sonardyne on the development of a subsea AUV launch and navigation solution. Smart Sound provided the perfect place to test this technology, with easy access to open water, vessels and subsea nodes, and an outgoing and helpful community who support activity.”

The Smart Sound Connect Subsurface team is currently seeking additional research and development partners to collaborate in further trials of the SSCS testing environment.
Anyone interested in testing new subsea vehicle operations, underwater data telemetry, or any other use of the new infrastructure is encouraged to contact Aaron Barrett, Lecturer in Autonomy at the University of Plymouth, to learn how they can get involved.