Planadores subaquáticos para vigilância costeira e levantamentos oceanográficos
Os planadores subaquáticos são veículos subaquáticos autónomos (AUVs) que coletam dados oceanográficos em longas distâncias e durações sem suporte de superfície. Utilizando mudanças na flutuabilidade e sistemas de controle a bordo, esses planadores navegam silenciosamente pelo oceano, apoiando missões científicas e de defesa.
Se você projeta, constrói ou fornece Planadores subaquáticos, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Planadores subaquáticos para vigilância costeira e levantamentos oceanográficos
Visão geral por
William Mackenzie
Atualizado:
Os planadores subaquáticos operam através do ciclo de flutuabilidade e do controlo da atitude por meio de mecanismos internos, como tanques de lastro, mecanismos de inclinação e lemes. Esses sistemas permitem uma navegação precisa e controlo de profundidade, otimizando o uso de energia. Normalmente equipados com monitores ambientais, modems acústicos e sensores CTD, os planadores subaquáticos são ferramentas essenciais em aplicações que vão desde a vigilância costeira até a inspeção de infraestruturas submarinas. O seu design autónomo e baixa assinatura acústica tornam-nos especialmente adequados para missões de longa duração em ambientes desafiadores.
Função e operação dos planadores subaquáticos
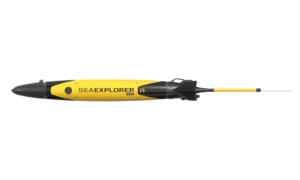
Planador subaquático autónomo SEAEXPLORER 1000 da ALSEAMAR
Os planadores subaquáticos diferem fundamentalmente dos AUVs tradicionais movidos a hélice. Esses veículos dependem de motores de flutuação e tanques de lastro internos para subir e descer na coluna de água. O planador avança numa trajetória em dente de serra, ajustando o ângulo de inclinação e rotação usando componentes internos, como baterias, cascos de pressão e unidades de navegação. Esta locomoção eficiente permite missões com duração de semanas ou até meses, sem necessidade de recuperação ou reabastecimento.
Um planador subaquático típico inclui um sistema de gestão de energia, painéis de carregamento solar (quando à superfície), um módulo de comunicações com capacidade de ligação por satélite e registadores de dados. Esses sistemas são gerenciados por um sistema de piloto automático integrado, que direciona os parâmetros da missão e os ajustes de navegação de forma autónoma.
Aplicações na ciência, defesa e indústria
Os planadores subaquáticos são empregados em uma ampla gama de setores devido à sua versatilidade e resistência:
Pesquisas oceanográficas e expedições científicas: os investigadores utilizam planadores para observação contínua dos oceanos, deteção de poluição e monitorização da qualidade da água. Sensores CTD, rastreadores de vida marinha e sistemas de mapeamento do fundo do mar ajudam os cientistas a monitorizar as mudanças nas condições oceânicas, a atividade biológica e as características do fundo do mar.
Vigilância costeira e reconhecimento naval: as forças armadas utilizam planadores autónomos para contramedidas contra minas, recolha de informações navais e segurança portuária. O seu perfil discreto e longa autonomia tornam-nos adequados para missões de vigilância marítima furtiva.
Inspeção de infraestruturas submarinas: Planadores equipados com modems acústicos e mapas de fundo marinho de alta resolução inspecionam instalações energéticas offshore, oleodutos e cabos submarinos. Estas missões melhoram a segurança e o planeamento operacional nos setores de energia offshore.
Tipos de planadores subaquáticos
Existem várias configurações de planadores subaquáticos, frequentemente categorizadas por profundidade operacional, duração da missão e capacidade de carga útil:
Planadores de águas rasas: projetados para áreas costeiras e estuários, frequentemente equipados com sistemas de planadores aquáticos focados na deteção de poluição e monitorização ambiental.
Planadores de águas profundas: podem operar a milhares de metros abaixo da superfície com cascos reforçados contra pressão e sistemas de gestão de energia de longo alcance.
Planadores de nível militar: incorporam camuflagem acústica aprimorada, uplinks de satélite criptografados e compartimentos de carga modulares para equipamentos específicos da missão.
Planadores em enxame: Planadores menores projetados para operações coordenadas em grupo, aumentando a cobertura da área e a resolução dos dados.
Cada tipo de planador é projetado para suportar parâmetros de missão e condições ambientais específicos.
Componentes e tecnologias principais
Os planadores subaquáticos incorporam vários componentes especializados:
Motor de flutuabilidade: Regula a subida e a descida ajustando o volume interno e a densidade.
Tanques de lastro: armazenam e expelem fluido para alterar a flutuabilidade durante uma missão.
Conjuntos de sensores: Incluem sensores CTD, monitores ambientais e registadores de dados.
Modems acústicos e ligações ascendente por satélite: Permitem a transmissão de dados em tempo real ou diferida para estações remotas.
Unidades de navegação: combinam navegação inercial, GNSS/GPS (quando à superfície) e sistemas de navegação por estimativa.
Estas tecnologias funcionam em conjunto para proporcionar operações autónomas e fiáveis em vastos ambientes marinhos.
Comparação com outros AUVs
Planador Slocum G3 da Teledyne Marine
Embora tanto os planadores subaquáticos como os AUVs tradicionais sejam autónomos, as suas filosofias de design diferem:
Propulsão: os planadores utilizam a flutuabilidade para se moverem; os AUVs tradicionais utilizam propulsores.
Consumo de energia: os planadores são mais eficientes em termos energéticos, tendo frequentemente uma duração mais longa por missão.
Velocidade: os AUVs tradicionais são mais rápidos; os planadores movem-se lentamente, mas de forma constante.
Aplicações: os AUVs são mais adequados para inspeções e intervenções de alta velocidade; os planadores destacam-se na monitorização persistente e na recolha de dados.
Normas e diretrizes operacionais
Os planadores subaquáticos utilizados em contextos militares e de investigação são frequentemente construídos em conformidade com:
MIL-STD-810: Considerações de engenharia ambiental para aplicações militares.
STANAG 4586: Normas de interoperabilidade para sistemas de veículos não tripulados.
IEEE 1451: Normas para interoperabilidade de sensores inteligentes e capacidade plug-and-play.
A conformidade garante a durabilidade do equipamento, a consistência dos dados e a integração entre plataformas de missão.