Oceanbotics answers the most frequently asked questions about remotely operated vehicles (ROVs), focusing on how they function, the different types available, and their expanding role in various industries. Read more >>
These tethered underwater robots perform a broad range of tasks, particularly in environments that are hazardous, hard to reach, or inefficient for human divers. Powered and controlled from the surface via a cable, ROVs are used in fields such as offshore energy, marine science, environmental monitoring, and search and rescue, where precision and remote access are critical.
The guide begins with an overview of how ROVs operate and outlines their classification, from compact hobbyist models to heavy work-class systems built for deep-sea missions. It also distinguishes ROVs from autonomous underwater vehicles (AUVs), noting the key difference: ROVs are piloted in real time, while AUVs navigate independently based on pre-programmed routes.
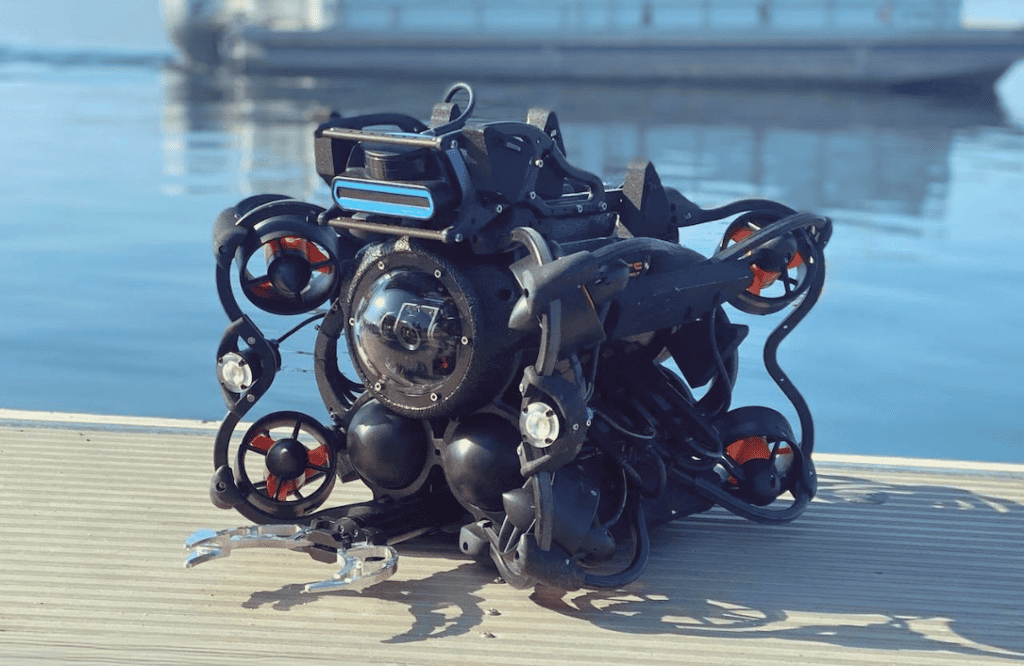
The article explores how ROVs are used in real-world scenarios, including law enforcement, underwater construction, research, and military operations. Common tasks include pipeline inspections, ship hull cleaning, debris removal, and data collection. Higher-end models support advanced tools such as imaging sonar, manipulator arms, and high-resolution cameras, enabling more complex underwater missions.
It also describes how ROVs are piloted using a combination of interface, software, and controller, often a laptop or tablet paired with a gaming-style input. Accessories such as sonar systems, acoustic trackers, and navigation tools can be integrated depending on mission needs. The full article offers a deeper look at each of these topics for readers interested in how ROVs are transforming underwater work.