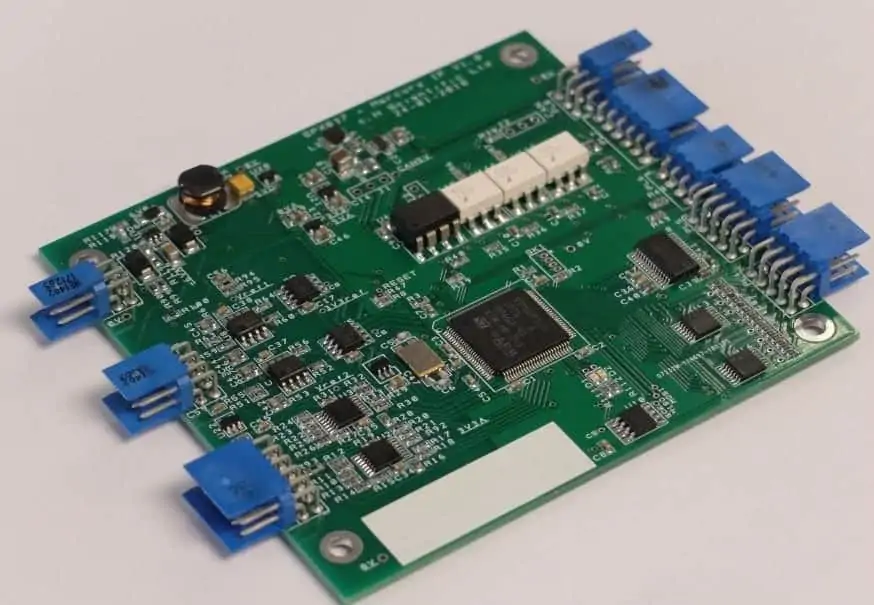
Altus LSA, an established supplier of Ariel Unmanned Systems based in Greece, approached Dynautics for the conversion of their standard RHIB for unmanned use. The standard RHIB was fitted with a Mercury Verado 150HP outboard motor, which are traditionally controlled by a Mercury proprietary interface protocol. Dynautics overcame this by developing a Mercury Interface Module (Dynautics MIM) and integrating a MHK NEC KE5+ electronics throttle system. The Dynautics system was designed to allow for both manned and unmanned operation.
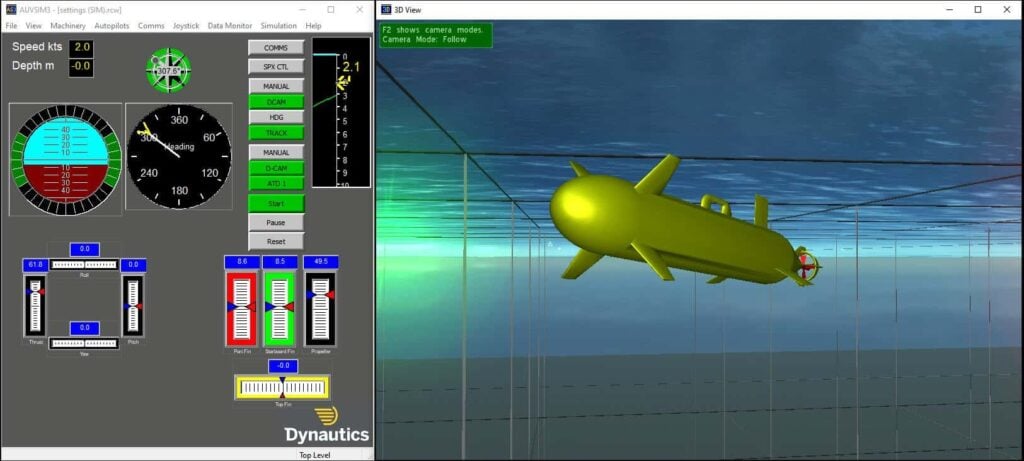
Mr Elias Glymidakis, project manager at Altus LSA, commented on the integration success: “Our customer demanded a reliable and cost-effective conversion of the manned RHIB to an unmanned version. Dynautics provided the MK4 Spectre navigation system and a customised interface to control the Mercury outboard motors. Dynautics responded quickly and thoroughly, and they also commissioned the electronics with our technicians.”
Dr. Henry Robinson, CEO of Dynautics, commented: “We have undertaken RHIB conversion previously for other customers and our MK4 system is ideally suited to this application.” Robinson also commented on the challenges of working with Mercury outboards motors: “It is well known that Mercury control systems are closed and access to their CAN control protocol is not possible. However, we successfully developed a solution that allowed us to achieve unmanned control and maintain the integrity of the system. We can now offer other customers the same solution.”
The Dynautics MIM is available on a small PC104 card (90 x 115 x 11.5 mm).