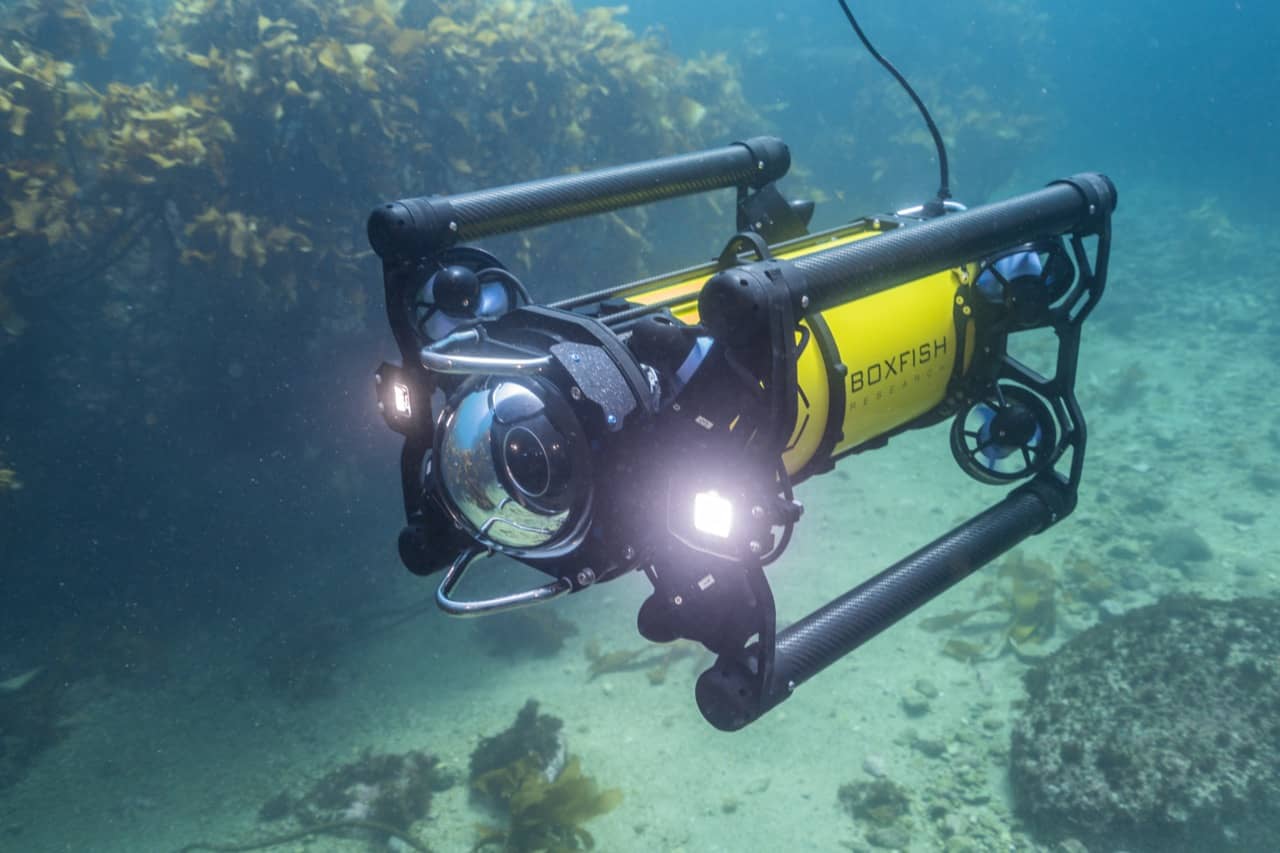
The Boxfish ROV from Boxfish Robotics was recently used by New Zealand commercial diving company Deep Dive Division to inspect a 163-meter tunnel in complete darkness and near zero-visibility conditions.
Configured with imaging sonar and pipe profiling sonar, the Boxfish ROV supported real-time navigation, acoustic data capture, and post-mission analysis in an environment where camera-based inspection was ineffective and diver entry was unsuitable.
Tunnel Inspection Challenges
Deep Dive Division was tasked with assessing a tunnel approximately 163 meters long. Before the inspection, limited information was available about the tunnel’s internal condition, including its geometry, potential bends, obstructions, and sediment build-up.
Water clarity inside the tunnel was extremely poor, preventing conventional camera systems from capturing usable information beyond the entrance area. The confined setting and unknown internal conditions also made diver entry unsuitable.
The inspection therefore required a system capable of navigating and collecting data in complete darkness and near zero visibility.
Sonar-Based ROV Configuration

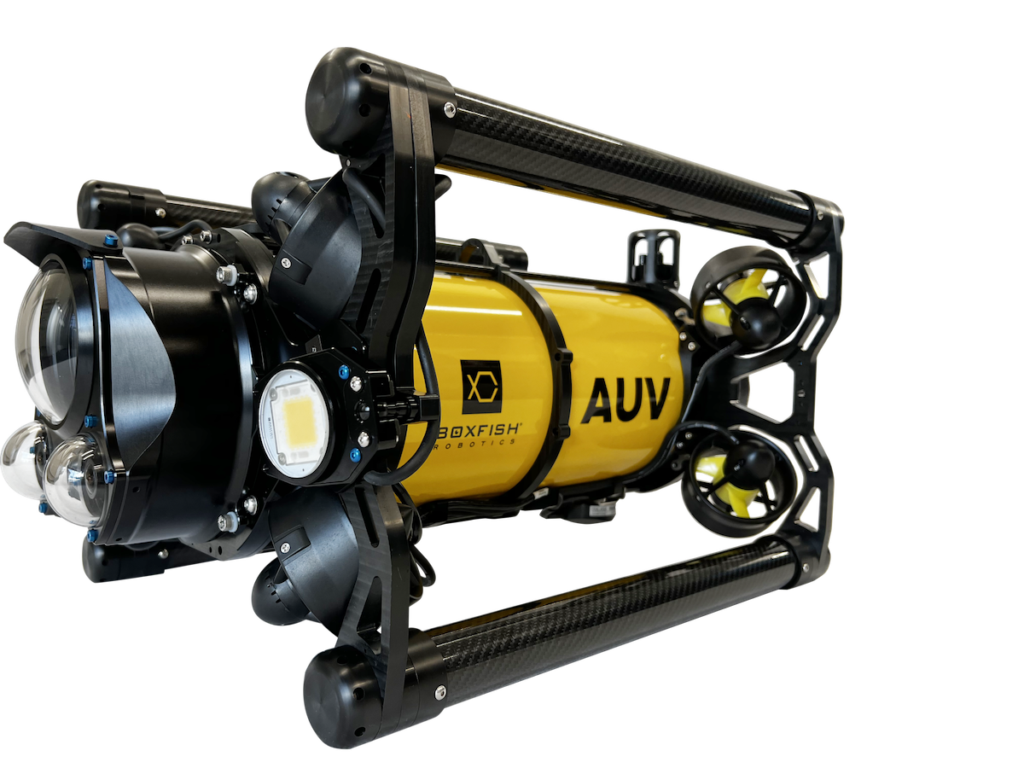
Boxfish ROV configured with imaging sonar (bottom) for navigation and pipe profiling sonar (top).
Deep Dive Division equipped the Boxfish ROV with imaging sonar system to support navigation and pilot situational awareness. The sonar enabled the pilot to identify tunnel walls, obstacles, and the general structure layout in real time, allowing controlled vehicle movement without visual references.
The team also equipped the ROV with pipe profiling sonar to capture cross-sectional and spatial measurements of the tunnel interior. This provided data on tunnel geometry, internal alignment, sediment accumulation, and structural variations along the tunnel length.
Together, imaging sonar and profiling sonar enabled the ROV to move safely through the tunnel while recording inspection data for review after the mission.
Data Capture and 3D Modeling
Using sonar-based navigation, the Boxfish ROV successfully traveled the full length of the tunnel. The pilot maintained stable, controlled movement using sonar data to navigate the confined environment.
As the ROV moved through the tunnel, the pipe profiling sonar continuously captured acoustic cross-sections. The Boxfish ROV supports a distance measurement feed that can be used by profiling sonar software to generate a three-dimensional representation of the pipe’s inner surface across the full 163-meter length. The ROV’s distance measurement feed can come from either a thrust-and-drag-based model or a Doppler Velocity Log (DVL).
Deep Dive Division Team, stated, “The Boxfish ROV and Pipeline Profiler complement the multidisciplinary expertise of our team, enabling Deep Dive Division to safely capture and interpret high-quality underwater data. By combining practical underwater operations with engineering, surveying, marine technology, and environmental science, we deliver clearer asset insights, more accurate reporting, and stronger outcomes for our clients.”
After the inspection, the recorded sonar data was processed into a full three-dimensional representation of the tunnel interior by combining sonar data with distance measurements and data from the Boxfish ROV’s onboard sensors.
This process transformed individual sonar profiles, distance measurements, heading data, and depth information into a continuous digital model representing the tunnel geometry and internal dimensions.
The resulting model showed that one section of the tunnel had slumped, while another section had become partially filled with sediment.

3D view of the tunnel. Courtesy of Deep Dive Division.

Tunnel section filled with sediment. Courtesy of Deep Dive Division.