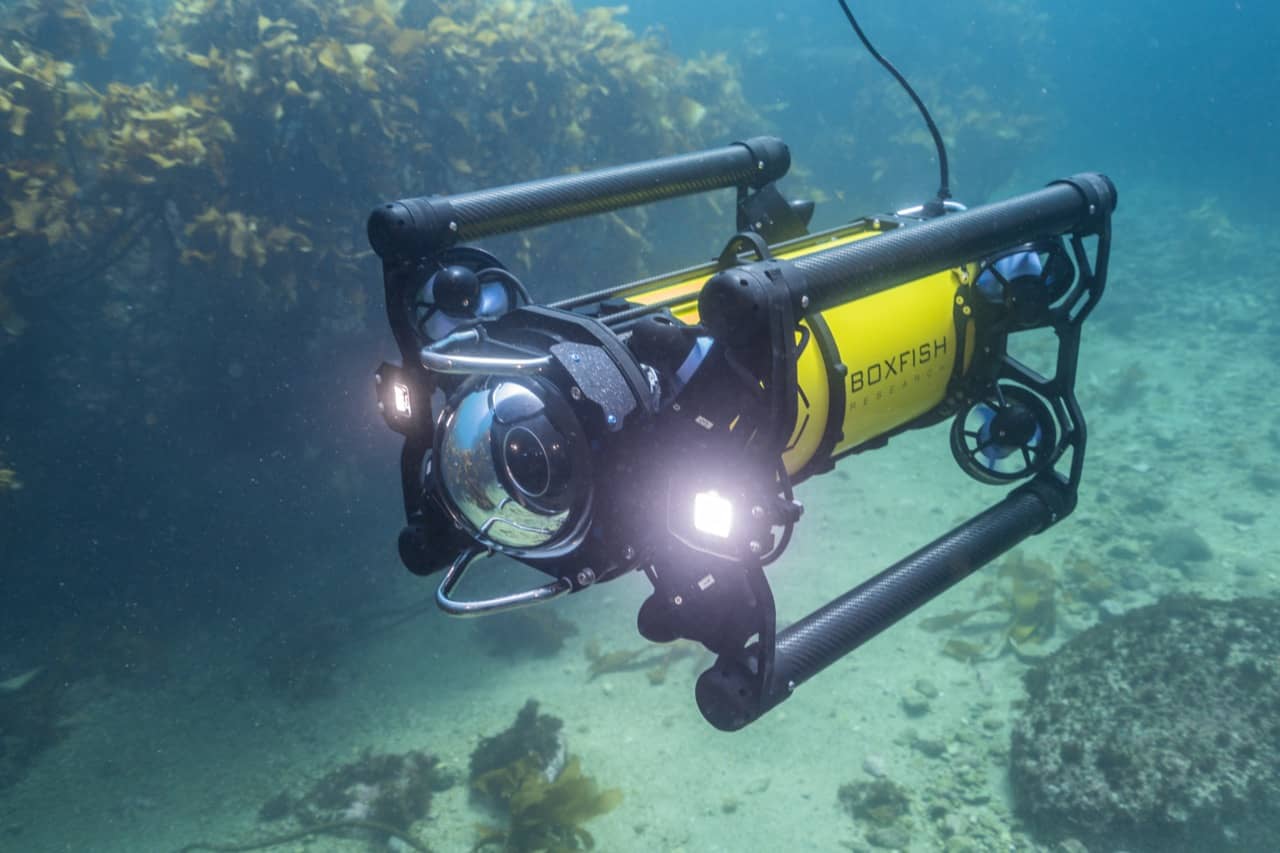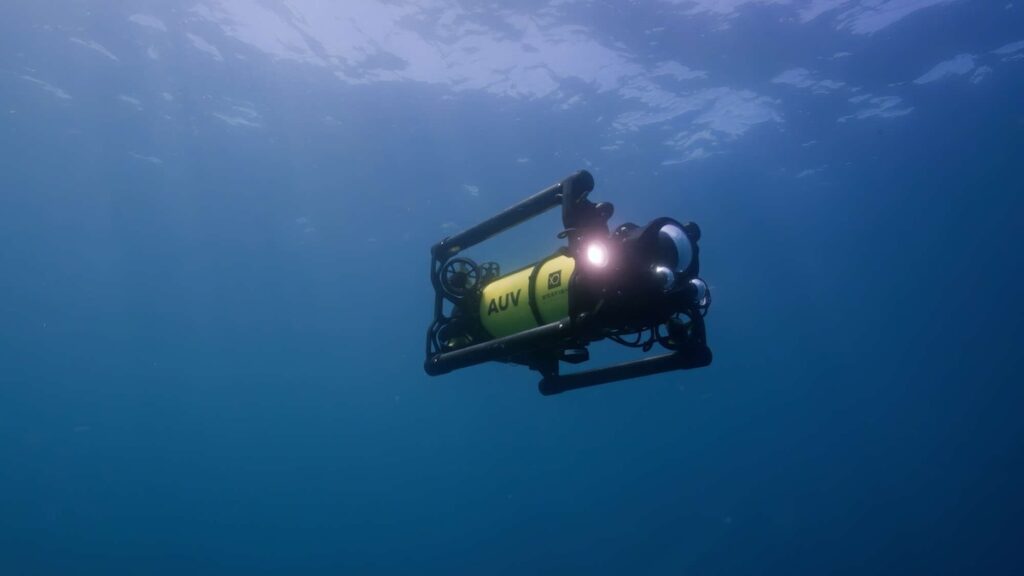
Boxfish Robotics’ Boxfish AUV is the company’s latest generation tetherless hovering autonomous underwater vehicle, developed for scientific research, environmental monitoring, and subsea inspection.
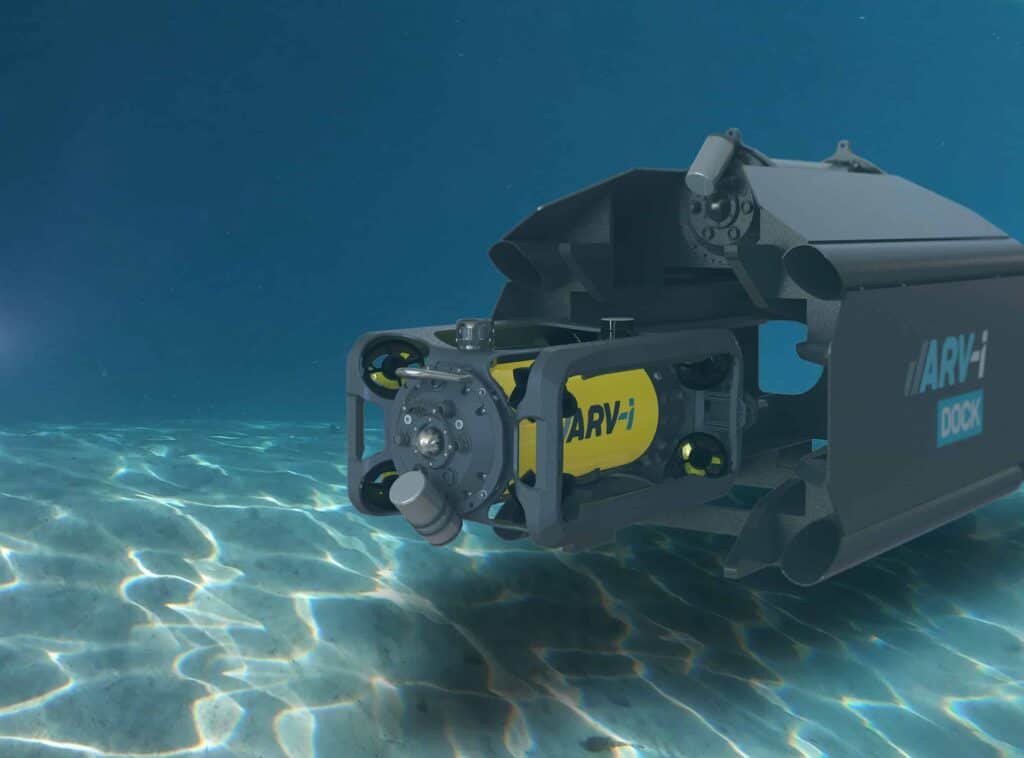
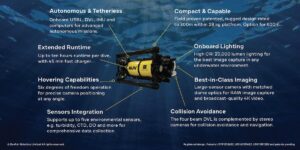
The vehicle provides six degrees of freedom maneuverability with dynamic stabilization and is available in models rated to 300 meters and 600 meters. Built on a modular architecture, the system supports fully autonomous operation as well as manual tethered control, and it can achieve a range of up to six kilometers on a single charge.
Applications and Mission Capabilities
The Boxfish AUV is employed across a wide variety of marine research applications. With four available sensor ports, the platform can be configured for benthic surveys, coral reef monitoring and bleaching studies, artificial reef observation, photogrammetry, seabed mapping, fish population assessments, and invasive species studies.
Navigation is supported by stereo cameras, USBL, IMU, and DVL sensors, combined with proprietary autonomy algorithms for reliable positioning and precise mission execution. Mission planning is carried out using the Boxfish SafePath Planner, a graphical interface that enables operators to set waypoints, grid patterns, or transects. At each point in a mission, vehicle pitch, speed, depth, altitude, lighting, and distance from objects can be adjusted. Mission paths can also be stored and repeated for consistent long-term surveys.
Boxfish Commander software provides operators with real-time telemetry and waypoint updates. Missions can be tracked through a web interface, and past operations can be replayed for post-mission analysis.
System Design and Performance
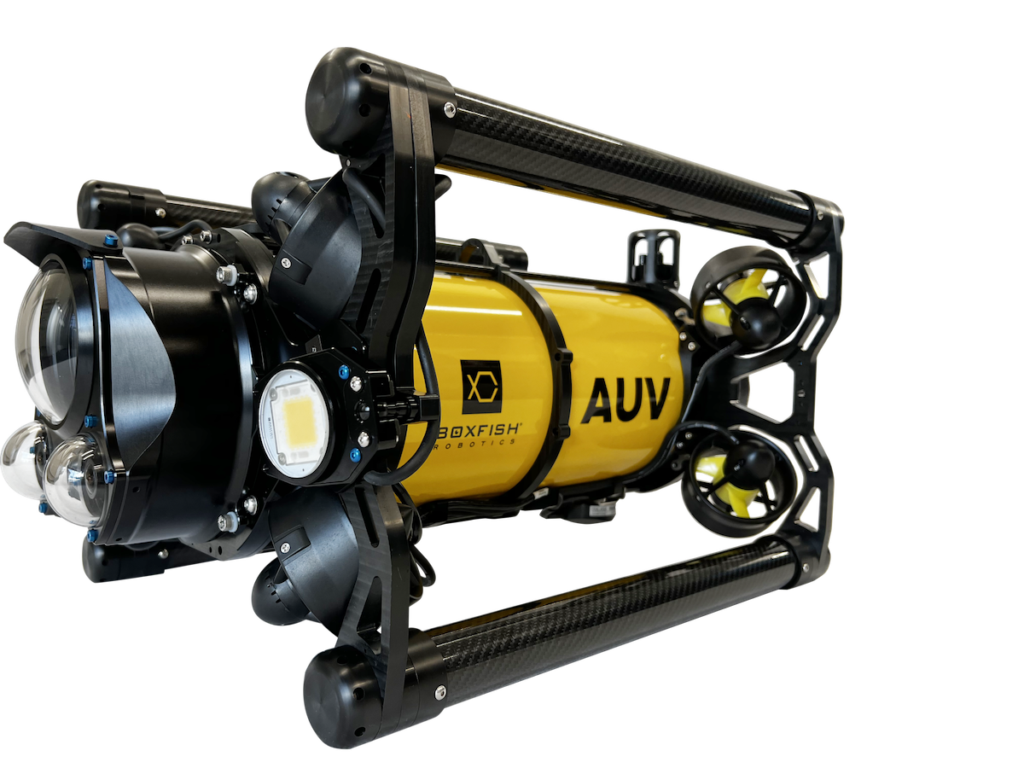
The AUV features a hard anodized aluminum alloy pressure vessel with an acrylic dome and employs eight vectored thrusters arranged in a 3D layout to achieve six degrees of freedom control. A fault-tolerant design allows continued operation even in the event of thruster failure. The vehicle operates in water temperatures from -10 °C to +45 °C and is available in 300-meter and 600-meter depth-rated versions.
Power is supplied by lithium polymer batteries with a capacity of 600 Wh, providing up to ten hours of dive time depending on conditions. Recharge time is five hours under standard charging, with an optional AC/DC field fast-charging system reducing this to 45 minutes.
Lighting is delivered by a forward-facing system outputting 20,000 lumens with high color rendering and full dimming capability. Adjustable arms and ball mounts provide illumination in multiple orientations, with additional lighting options available.
Features and Benefits

Payloads and Sensor Integration
The Boxfish AUV can be equipped with a range of payloads through external interfaces including RS232, RS422, RS485, and Ethernet, along with 12V and 24V power outputs. Optional add-ons include the Oculus Imaging Sonar as well as a suite of environmental sensors such as miniCTD, pH, turbidity, chlorophyll, fluorometer, and hydrophone systems. Imaging options include a front triple camera head, a Sony 4K main camera, and stereo machine vision cameras.
Integrated sensors include a depth sensor, IMU, internal pressure monitoring, temperature and humidity sensors, battery voltage monitoring, leak detection, thruster fault detection, USBL, and DVL.
Form Factor and Control Options
Measuring 730 by 435 by 351 millimeters and weighing 25 kilograms with saltwater ballast installed, the Boxfish AUV is compact and lightweight for deployment and handling. Optional accessories include a fiber optic tether and reel, manufactured in required lengths and neutrally buoyant in fresh water, and a surface control station equipped with a 17-inch 4K monitor and physical controls for real-time operation.