3D Forward Looking Sonars
FarSounder’s Argos series sonars are commonly utilized 3D Forward Looking Sonars, installed on various vessel types worldwide. Initially designed for mid-sized crewed vessels, Argos 3D FLS systems have been operational on uncrewed vessels since 2021.
These systems are currently installed on various defense and civilian USVs measuring 14 meters or longer. Depending on the model, Argos 3D FLS can detect objects from distances ranging between 350 meters (over 1,100 feet) to 1,000 meters (more than half a nautical mile) ahead of a vessel.
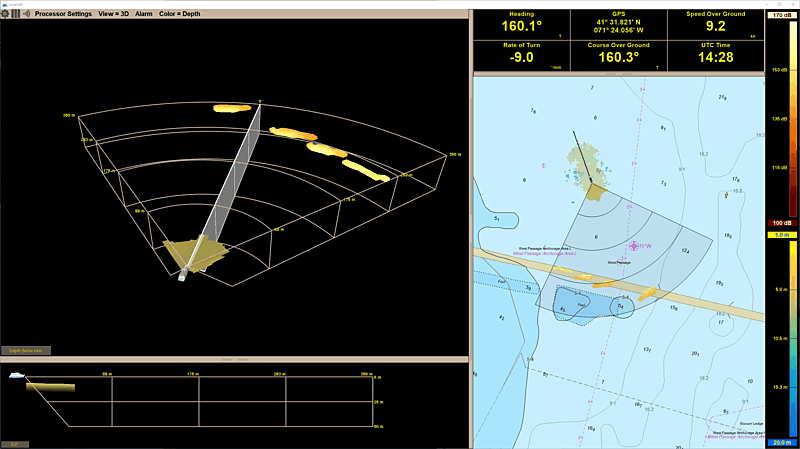
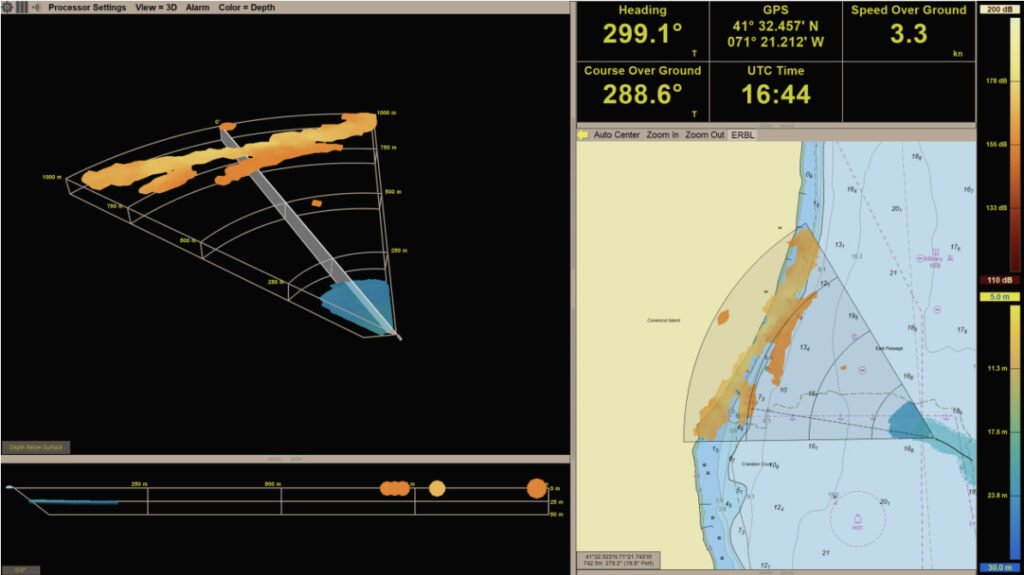
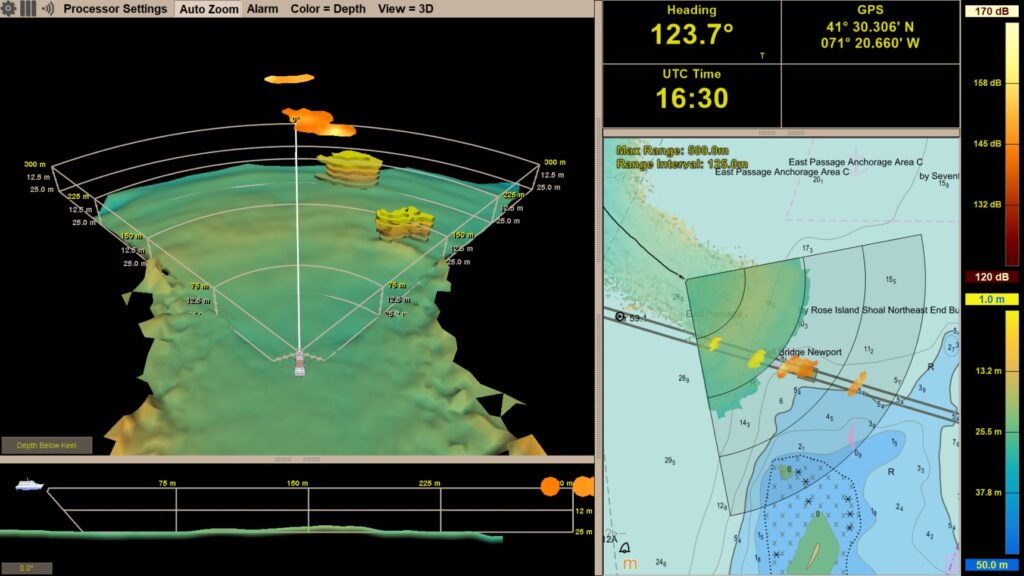
The Argos series provides real-time navigational awareness, constructs bathymetric maps as vessels traverse different areas, and offers the option to anonymously share this data across the FarSounder network while contributing to Seabed 2030. The sonar data can be accessed both through a machine interface for automated control systems and via a graphical display for human operators.
The FarSounder team is also developing new hardware specifically designed for USVs under 14 meters in length, featuring lower power consumption, a smaller physical footprint, and reduced costs. These advancements aim to make 3D FLS technology more accessible across a wider range of uncrewed vessel types, improving navigation safety across the industry.
The Role of USVs
Autonomy and uncrewed vehicle (UxV) systems are increasingly prevalent across various industries and vehicle types. The rapid advancement and integration of drone technology in the maritime sector continues to accelerate. The combination of improved broadband connectivity at sea, AI-driven control systems, a shrinking pool of skilled mariners, and the demonstrated success of uncrewed systems in the Ukraine conflict has created a significant opportunity for Autonomous/Uncrewed Surface Vessel (ASV/USV) platforms.
Now that the effectiveness of USVs and their role as force multipliers have been established, the industry is poised for broader adoption beyond defense. Applications such as hydrographic surveying, search and rescue, environmental monitoring, and even cargo and passenger transport are becoming increasingly viable. However, as these use cases expand, one critical question remains: what is underwater, ahead of the vessel right now?
Like their crewed counterparts, the standard technology for assessing subsurface navigation hazards remains the electronic nautical chart (ENC). It is relatively straightforward to use ENC data to generate routes that avoid shallow areas and underwater obstacles shown on the map.
However, there is a fundamental problem with this approach: it assumes that the underlying hydrographic survey data is complete. While this may be the case in primary shipping routes and well-developed regions, globally, only about 50% of coastal waters have been surveyed using modern methods. As USVs operate in more remote coastal areas, relying on nautical charts alone is insufficient for safe navigation.
Above-Water Sensors vs 3D Forward Looking Sonars
Initially, USV development prioritized above-water sensors such as GPS, AIS, radar, and optical/thermal imaging, ensuring compliance with US Coast Guard Rules-of-the-Road and COLREGS. Early testing took place in well-charted or deep-water areas, minimizing concerns about underwater hazards and making the limitations of ENCs less critical.
However, as ASVs and USVs move into more challenging environments, those assumptions no longer hold. Due to limited hydrographic office resources worldwide, comprehensive mapping efforts remain incomplete. Even within US territorial waters, only about 52% have been fully mapped.
Seabed 2030, a collaborative initiative between GEBCO and the Nippon Foundation, with support from the IHO and endorsement from the UN, aims to compile a global seafloor map. Yet, even with crowdsourced data and contributions from private survey operators, the initiative’s dataset only covers around 26% of the ocean floor at a maximum resolution of 100 meters.
For traditional crewed vessels, local knowledge and experienced bridge crews help mitigate charting limitations in shallow waters. USVs, however, lack these human-driven insights, leading to gaps in situational awareness. Additionally, nautical charts cannot account for temporary obstacles, seafloor changes from seasonal events or natural disasters, or operations in GPS-denied environments.
These challenges are particularly relevant in commercial, military, and scientific efforts in the Arctic, where environmental changes occur rapidly, and in conflict zones where GPS jamming and spoofing are common.
Above-water sensors alone cannot detect submerged hazards such as uncharted rock formations or coral heads. They also fail to identify debris obstructing previously well-mapped channels after a storm or the submerged sections of icebergs. Furthermore, their ability to detect marine life, such as whales, is limited since these animals spend most of their time below the surface.
Avoiding whale collisions is not only critical for vessel safety but also vital for marine mammal protection, as ship strikes are a leading cause of mortality for large whale species, including the critically endangered North Atlantic Right Whale.
ASVs and USVs are not limited to above-water sensors. 3D Forward Looking Sonar provides a vital underwater perspective. Introduced to the commercial maritime sector in 2005, 3D FLS is a well-established technology that addresses many of the limitations associated with above-water sensors.
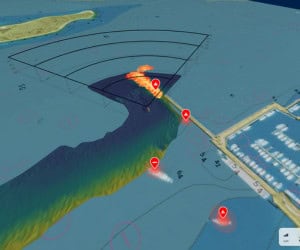
When integrated with traditional navigation tools, 3D FLS enables vehicle control systems and remote operators to develop a more complete picture of their surroundings, identifying uncharted seafloor features, shifting sandbars, and transient objects.