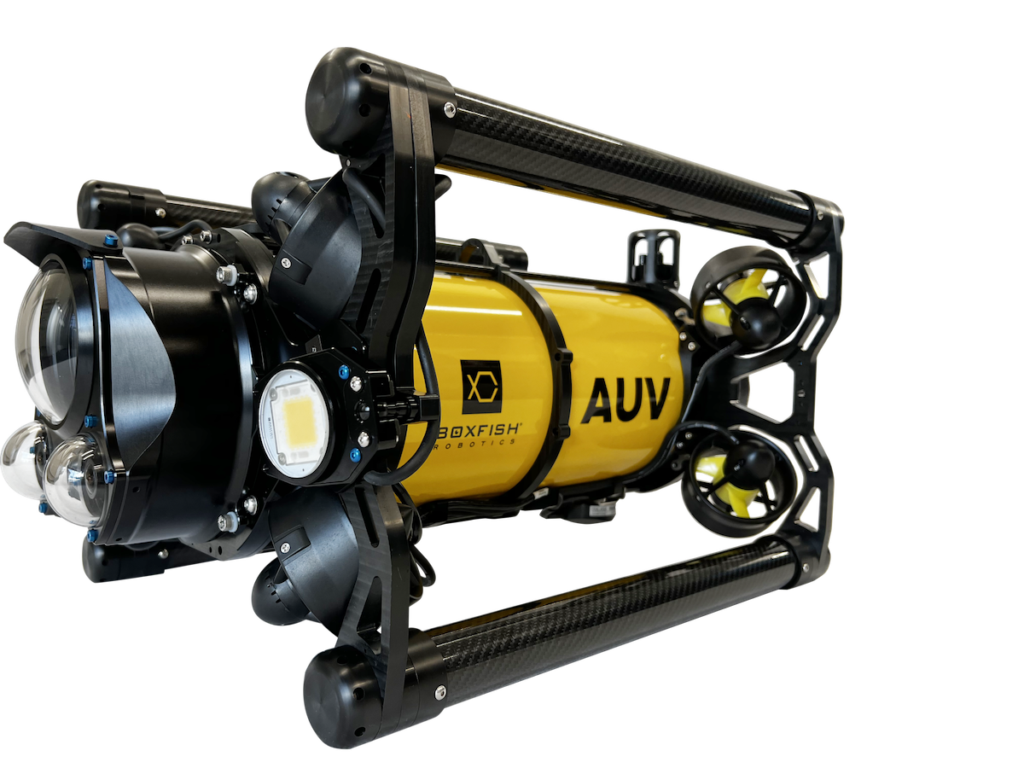
A recent project undertaken by the Port of Auckland Environmental Team using a Boxfish Robotics hovering Autonomous Underwater Vehicle (AUV) examined whether fully autonomous transect surveys could improve visual consistency, positional accuracy, and operational efficiency for ongoing harbour health monitoring and environmental compliance.
The survey was carried out in the Rangitoto Channel within the wider operational environment of the Port of Auckland in New Zealand, where environmental monitoring programs require repeatable seabed video transects that can support long-term comparison.
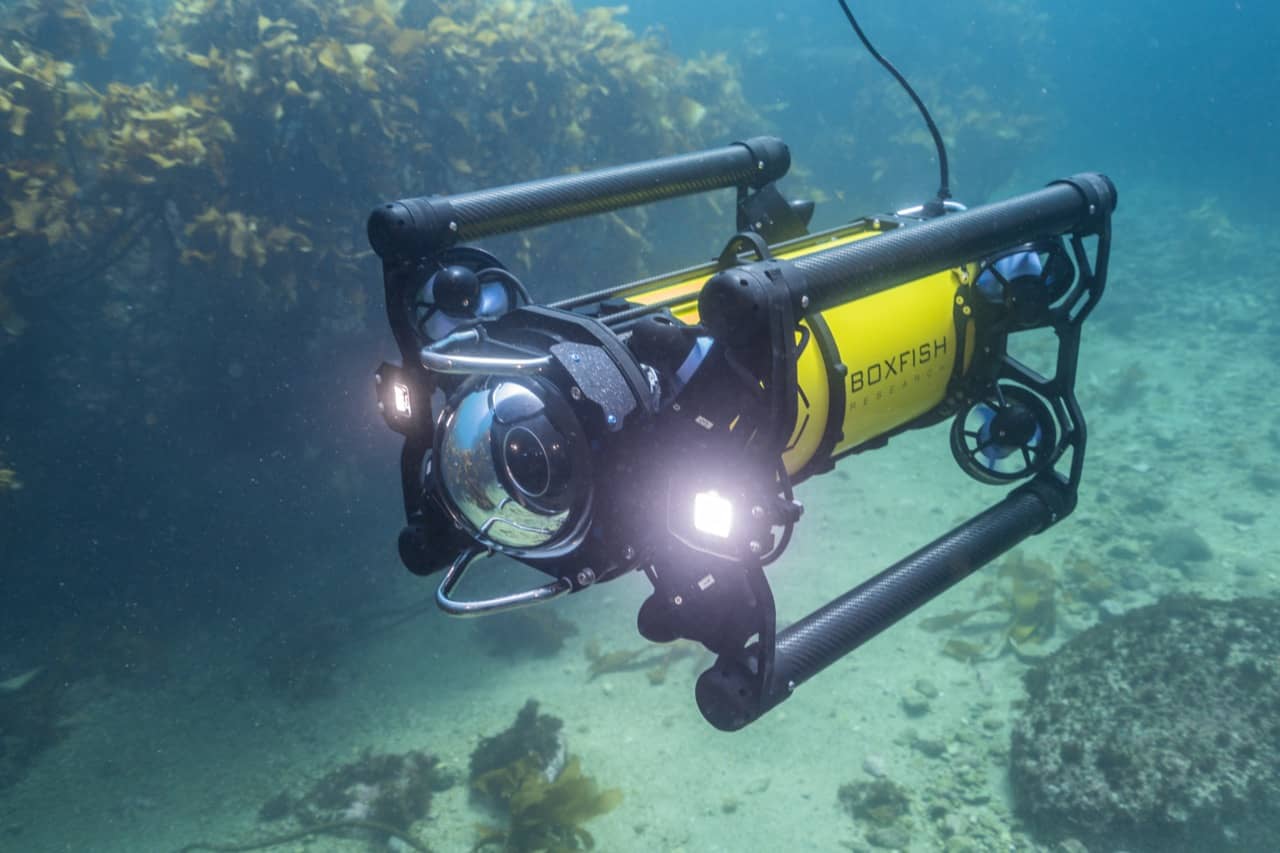
The survey utilised a hovering AUV developed by Boxfish Robotics, programmed to navigate autonomously between predefined waypoints across the Rangitoto Channel. After deployment from a small vessel by a two-person team, the vehicle maintained consistent altitude, pitch, and speed while collecting continuous video and positional data without operator input. This stable survey profile supported a controlled data collection process designed to enable repeatable monitoring across future surveys.
The resulting seabed footage delivered consistent framing, even illumination, and clearly defined individual frames that supported reliable interpretation of seabed features. Maintaining a constant altitude relative to the seabed ensured uniform scale and perspective along the transect, while latitude and longitude were recorded continuously throughout the mission and supported by RTK GPS. This allowed the vehicle to follow the planned survey route closely and provided accurate spatial reference for the collected imagery.
The Rangitoto Channel mission provides a practical example of how hovering AUV systems from Boxfish Robotics can support long-term monitoring programs that require consistent and comparable datasets. By enabling deployment from small vessels and reducing the need for manual piloting during operations, autonomous transects simplify field operations while allowing environmental teams to focus on interpreting survey data.
Read the full case study to explore how autonomous AUV transects are supporting harbour environmental monitoring and repeatable seabed surveys.